80C51¶
约 7847 个字 218 行代码 61 张图片 预计阅读时间 33 分钟
学习路线
上课不要听,花两到三次课或者整块的空闲时间把这一套课程听完。讲的简洁易懂特别好。 看完视频之后直接把作业做掉,实验做了,可以结合实验对所学知识有一个更深的了解。 期末的时候再结合课件做补充。
重点理解
- C51 资源分布:CPU 里边有哪些东西,代码放在哪里?变量放在哪里?怎么取出来
- PC 指针及其作用
- 存储器的分布,各个部分都是放什么的。SFR 中的各个寄存器可以控制单片机的各种资源
- 最后了解汇编

简介 ¶
- 什么是单片机
一台能够工作的计算机要有这样几个部份构成:CPU(进行运算、控制
而在单片机中,这些部份全部被做到一块集成电路芯片中了,所以就称为单片机(单芯片)
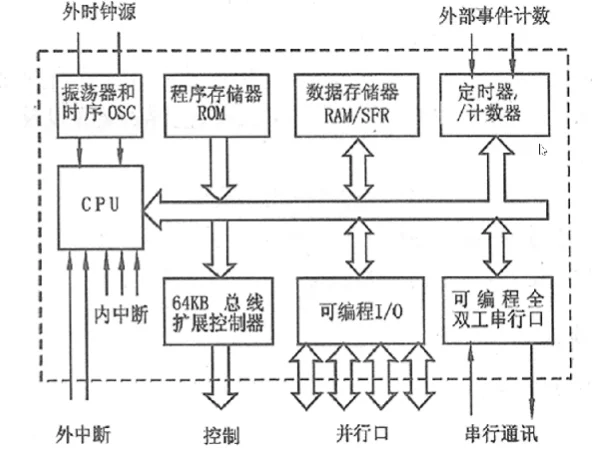
- 8 位 CPU
- 4K ROM 存放程序
- 128B RAM 存放数据
- IO 接口
- 2 个 16 位定时计数器
- 1 个全双工可编程串行口
数据总线、地址总线、控制总线
结构 ¶
单片机应用原理篇之 80C51 的 CPU_ 哔哩哔哩 _bilibili
引脚 ¶

缺口左侧是 1 号口
单片机的 40 个引脚大致可分为 4 类:
电源、时钟、控制和 I/O 引脚。
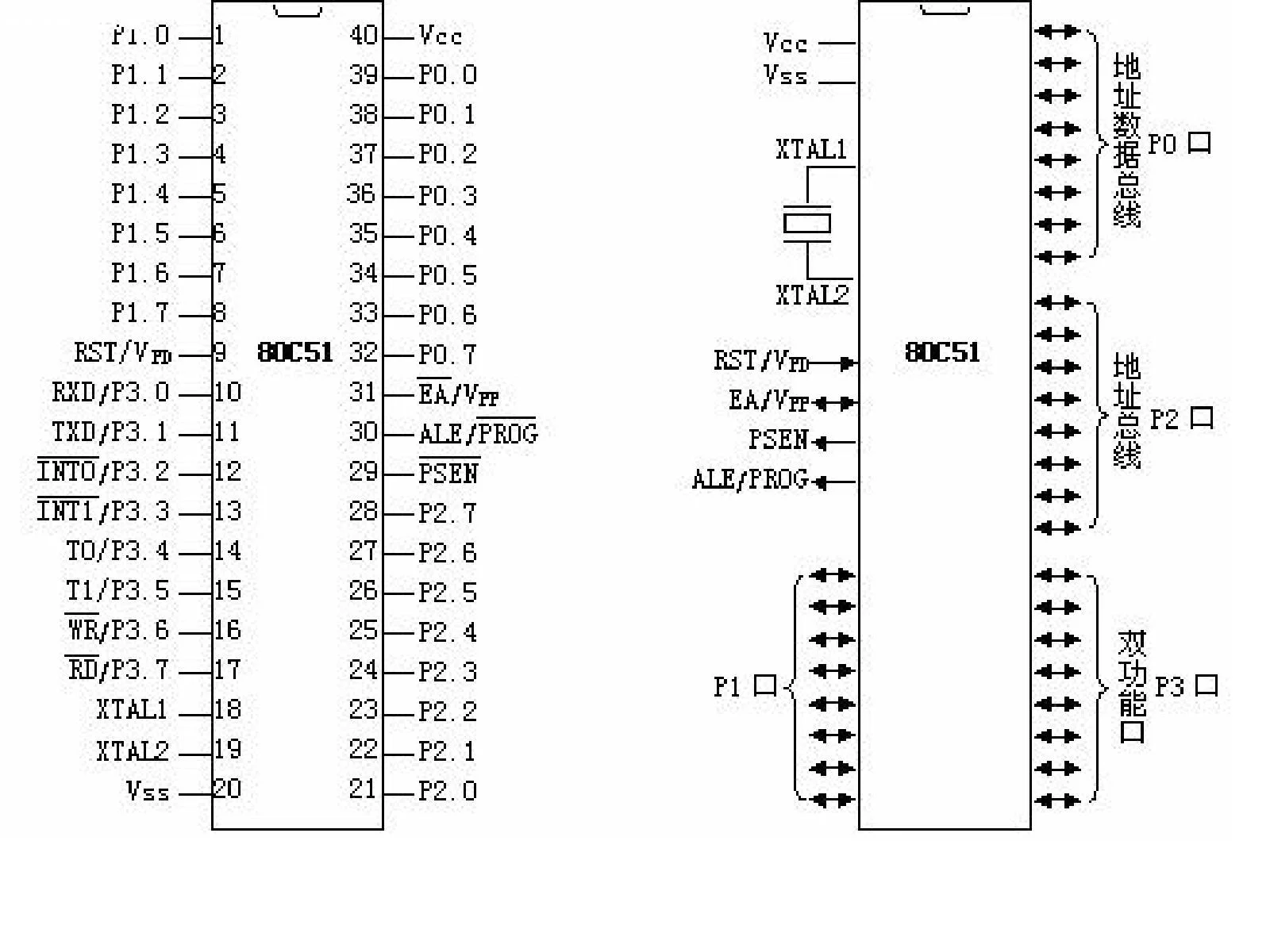
电源引脚:Vcc 40 脚 :5V;Vss 20 GND
控制引脚:RST 9 高电平复位;ALE;
80C51 共有 4 个 8 位并行 I/O 端口:P0,P1,P2,P3 口, 共 32 个引脚。
CPU¶
CPU 的位数:8 位
CPU 的作用:取指令,译码,执行
CPU 的构成
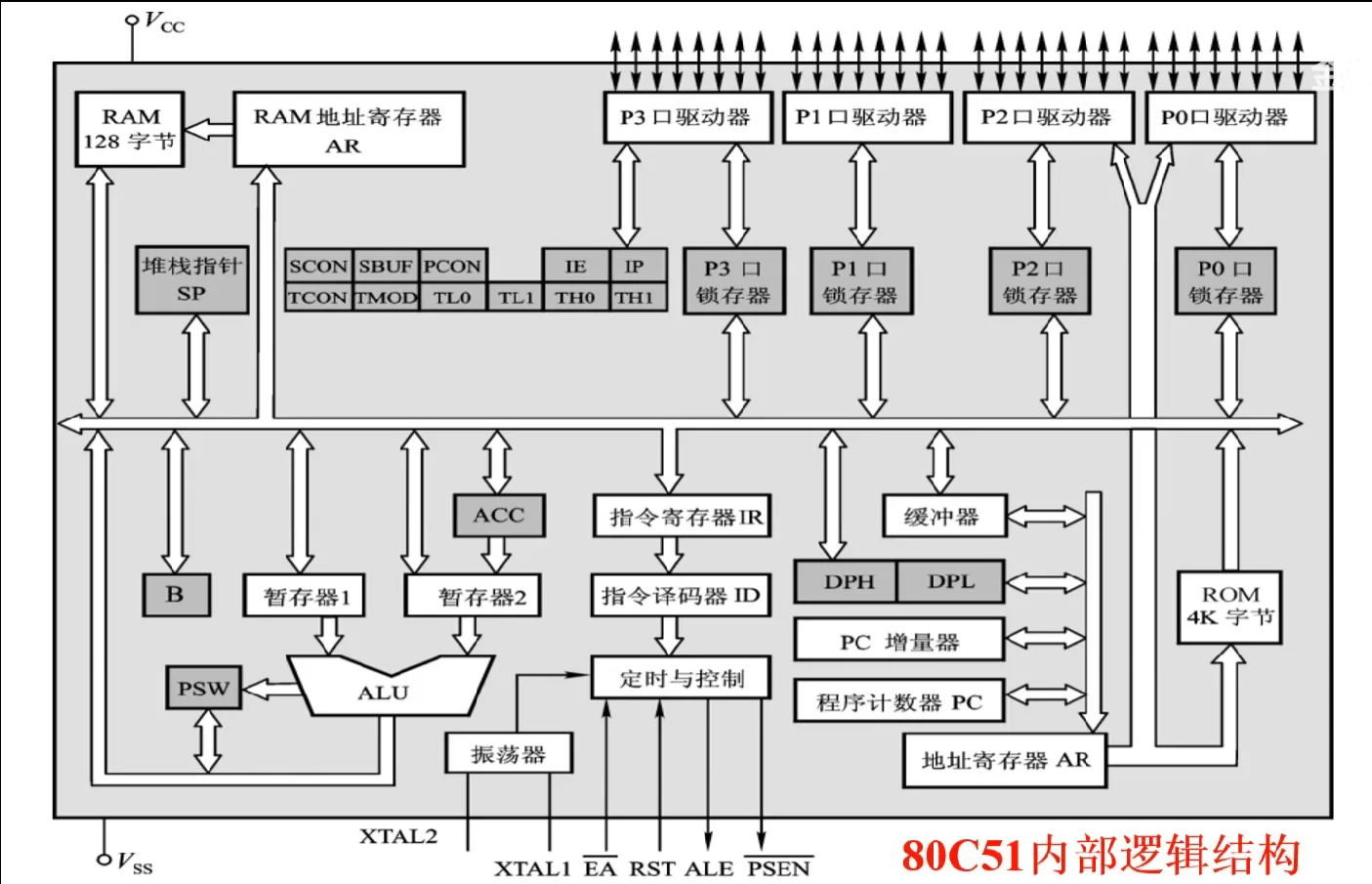
- 运算器
寄存器 B:乘除法
累加器 A:最繁忙的寄存器
PSW 程序状态字寄存器
- 控制器
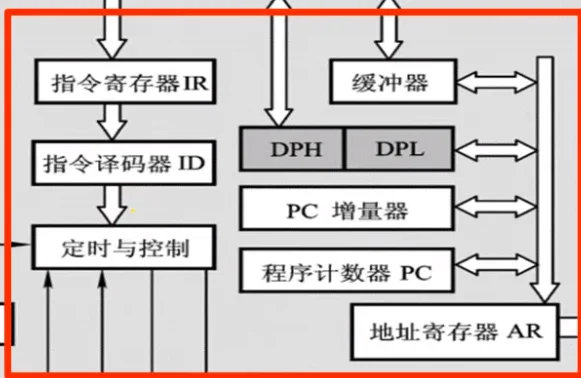
- 程序计数器 PC(16 位,24K
) ,控制读取的代码;一开始指向 0000H,跳转到 30H 开始执行
;30H开始放代码
MOV A,20H
MOV B,20H
MOV C,20H
- 数据指针寄存器 DPTR(data pointer);16 位,可寻址范围 64KB; 指向外部 ROM 或 RAM 的地址指针
存储器构造¶
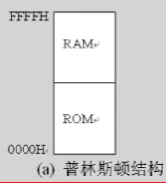
看总线区分哈佛和冯诺依曼:数据总线和地址总线
- 哈佛结构 RAM 和 ROM 是分开的;独立结构;可以同时获得数据和代码
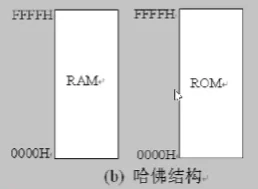
- 冯诺依曼结构 RAM 和 ROM 是相邻的,统一编址(分时)
51 单片机是改进哈佛结构,分时复用,一套数据地址总线,通过指令的方式区分
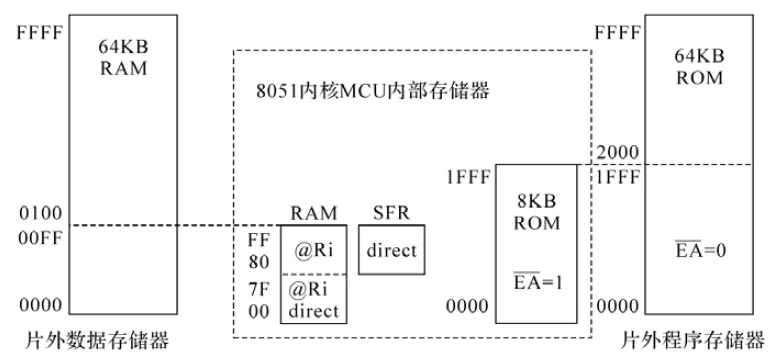
4 个物理存储空间,实际是 3 个逻辑存储空间; 地址总线是 16 位的,最大不可以超过 64K
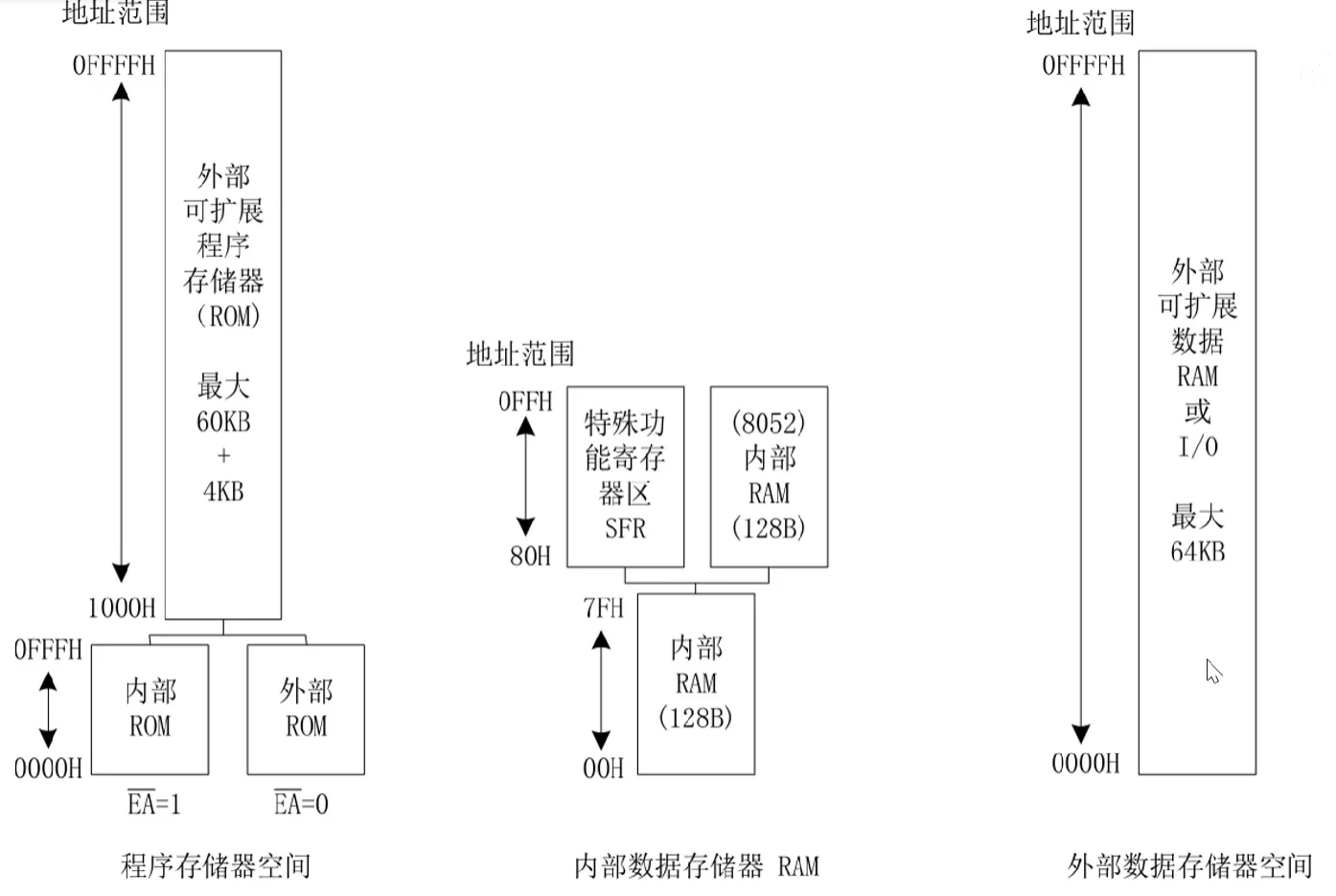
程序存储器 ROM |READ ONLY MEMORY ¶
在 89C51 中的 ROM 是一种电可擦除的 ROM,称为 FLASH ROM
存放程序、表格常数;
在运行过程中只读不可写,掉电不丢失数据。
EA 引脚,EA=1 方案 1,EA=0 方案 2
- 方案 1:4K 以内地址在片内 ROM,大于 4K 的在片外 ROM
- 方案 2:片内 ROM 禁用,全部存放在片外
| 0023H | RI/TI 中断跳转 |
| 001BH | T1 中断跳转 |
| 0013H | INT1 中断跳转 |
| 000BH | T0 跳转 |
| 0003H | INT0 中断跳转 |
| 0000H | 主程序跳转指令 ( 只有三个 Byte) |
数据存储器 RAM |READ RANDOM MEMORY ¶
所谓随机存取存储器,即随时能改写,也能读出里面的数据,它类似于我们的黑板,我能随时写东西上去,也能用黑板擦擦掉重写。
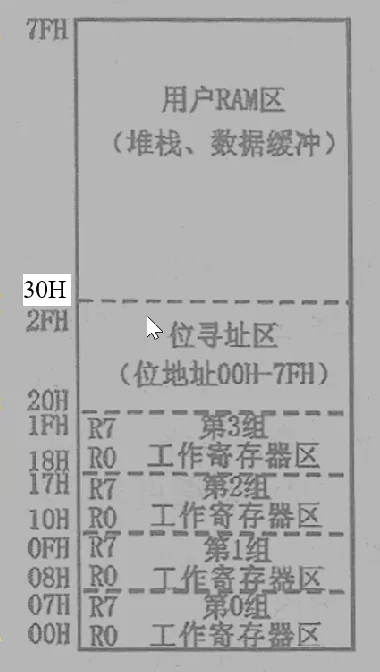
空间分配
低 128 字节 real RAM 00H-7FH
- 1 工作寄存器区:4x8bytes 每个区域都是 R0-R7; 只能选一组
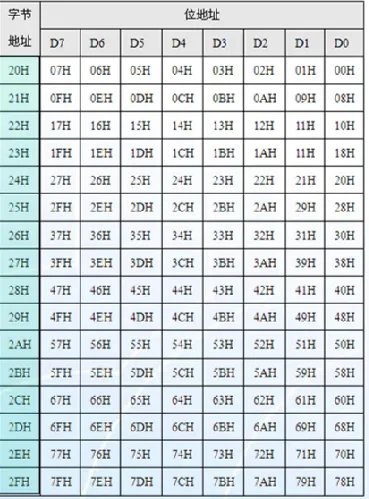
- 2 可位寻址区:对 00H-7FH 进行位编址,通过指令区分
- 3 用户 RAM 区
1 和 3 只能字节寻址,只有 2 可以位寻址
高 128 字节 SFR 特殊功能寄存器 80H-FFH
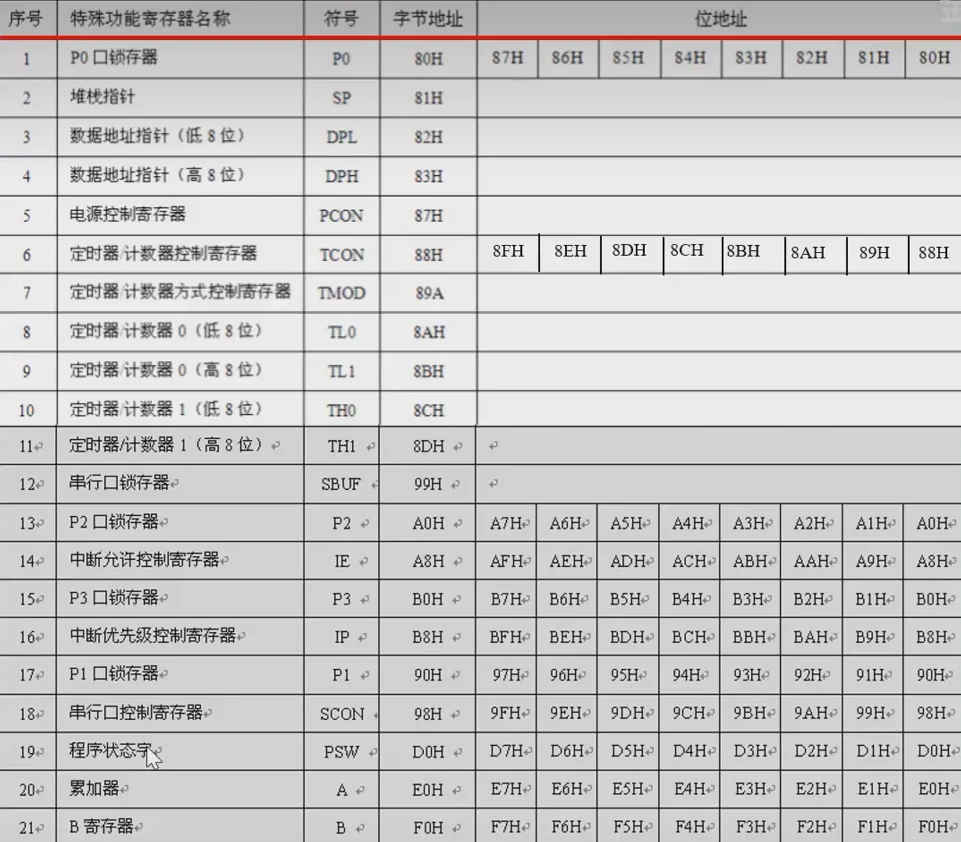
以 0 或 8 结尾的可以容许位寻址
复位 ¶
复位——使单片机回复原始默认状态的操作

复位 RES
- A = 0
- PSW = 0
- PC = 0
- DPTR = 0
- SP = 07H
RST(9pin
I/O¶
先易后难,所以 P1-P3-P0-P2
可能的作用
- 外部设备连接:存储器扩展 - 并行 IO 输入 - 串行通信
80C51 共有 4 个 8 位并行 I/O 端口:P0,P1,P2,P3 口, 共 32 个引脚。
- P0 口既可以作为普通 I/O 口,又可以作为外部扩展时的数据总线和地址总线的低 8 位,分时复用;作为普通 I/O 口时,外部要接上拉电阻。
- P1 口可以作为普通 I/O 口使用,内部带上拉电阻。
- P2 口可以作为普通 I/O 口使用,又可作为外部扩展时地址总线的高 8 位,作为普通 I/O 时,内部带上拉电阻。
- P3 口作为普通 I/O 时,内部带上拉电阻。第二功能,用于特殊信号输入输出和控制信号(属控制总线)
P1
具有通用 IO 口的方式,可实现输出,读引脚、读锁存器三种功能
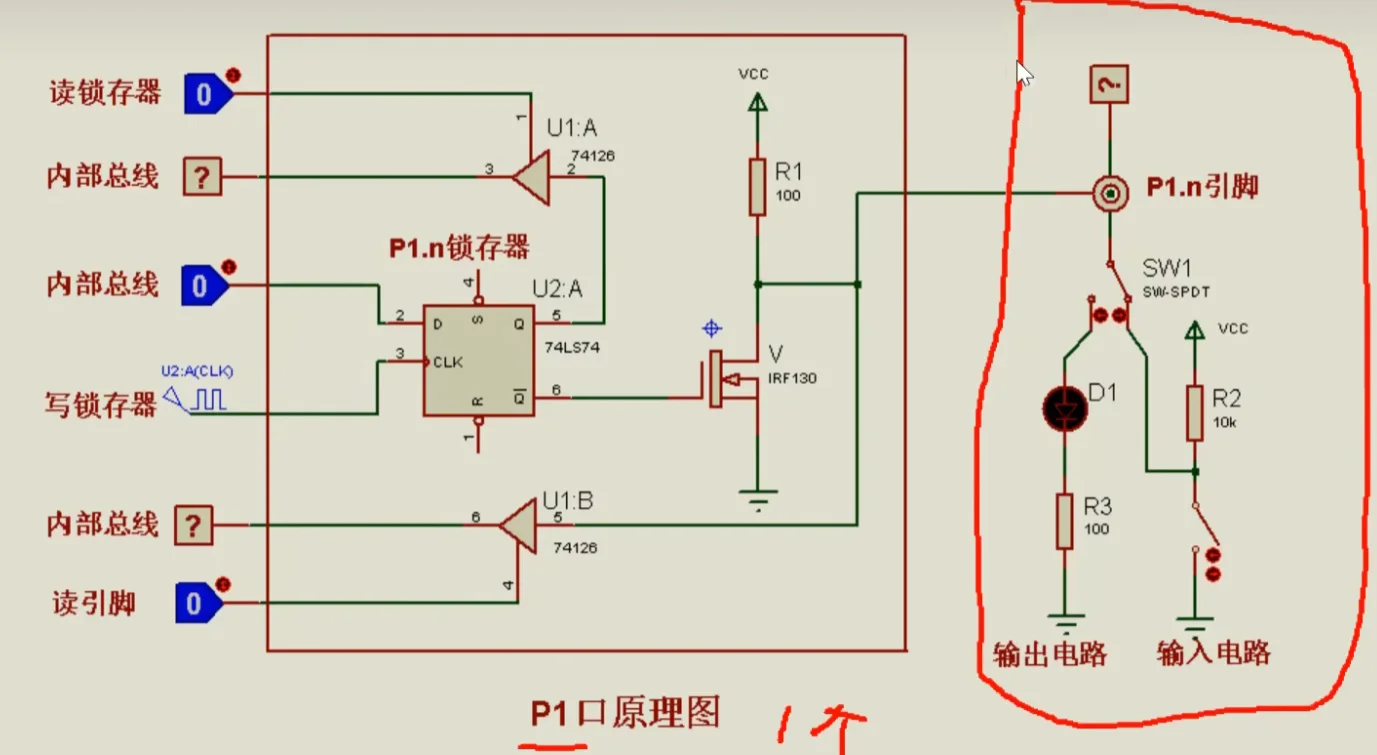
外部电平跟随内部总线上的电平
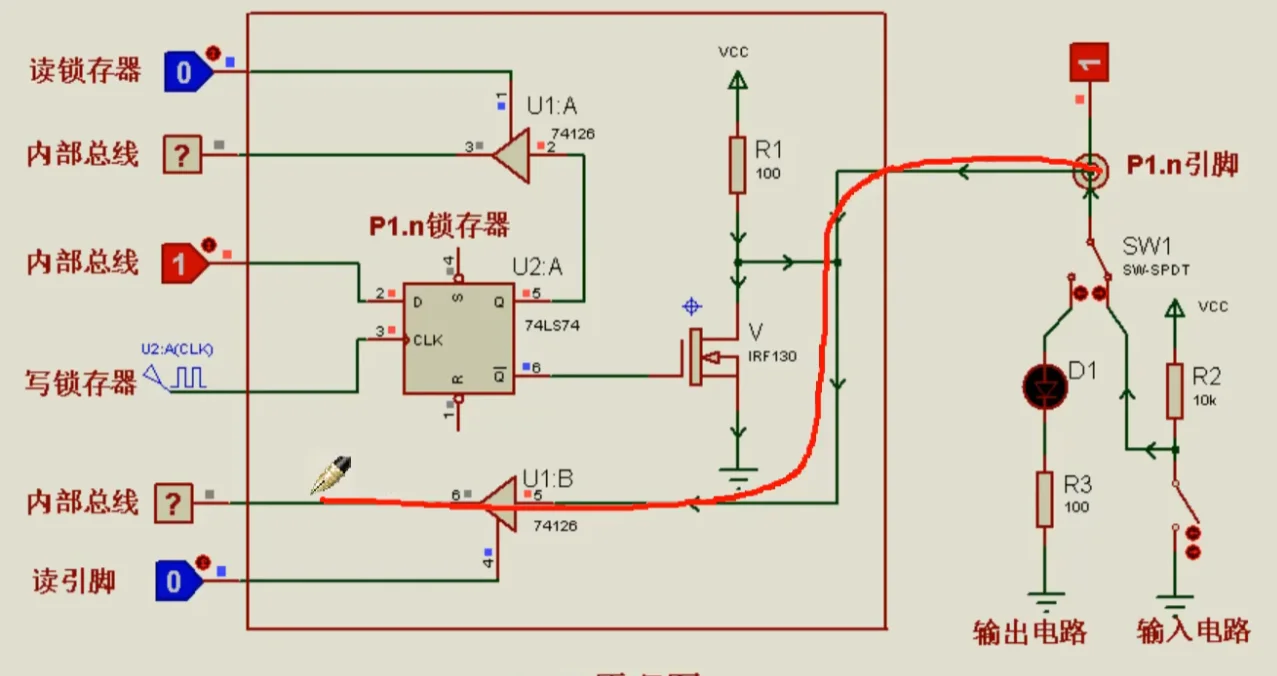
- 读取外部操作的时候,读引脚(最下边)高电平,可以读入
- 读内部的锁存器:如对总线进行取反等操作的时候,
注意:
- 内部总线先写 1,使得场效应管先处于截止的状态,不然可能中间有回路导通,一直读取的是 0
- 最高带 4 个 LSTTL
- 拉电流与灌电流区别
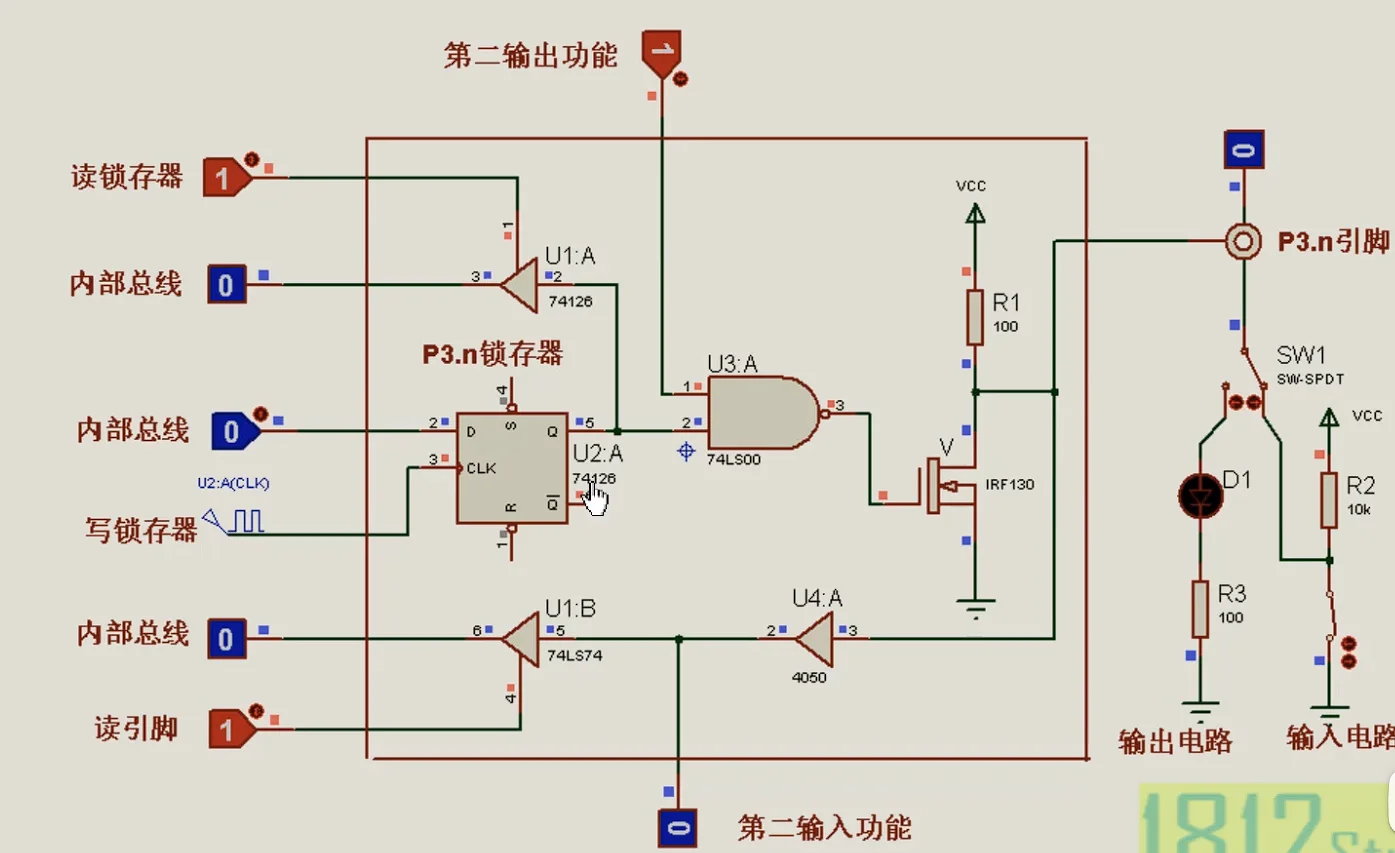
P3
- 通用 IO 口:可实现输出、读引脚、读锁存器三种功能
- 准双向通用口,作为通用输入口之前应显示 P3.n 置 1,通用输出口应该使第二输出端置 1
- 普通 IO 第二输出为 1,完全由锁存器 Q 端决定,即由内部总线决定
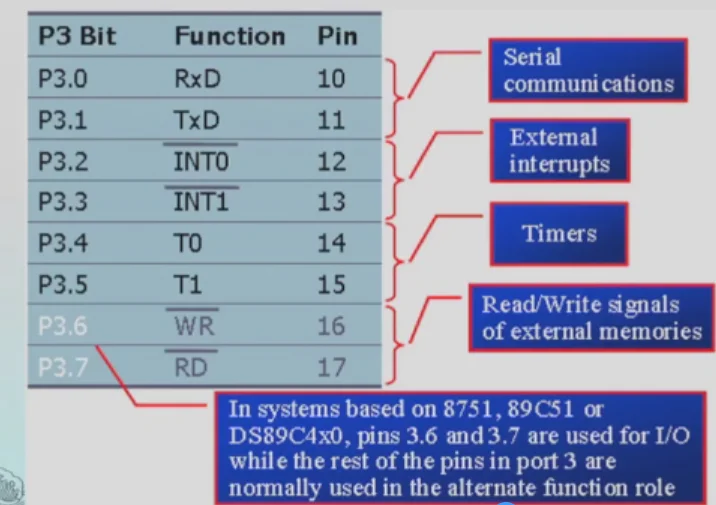
输入功能的时候,内部引脚也要置 1
P0,P2
中断 ¶
流程 ¶
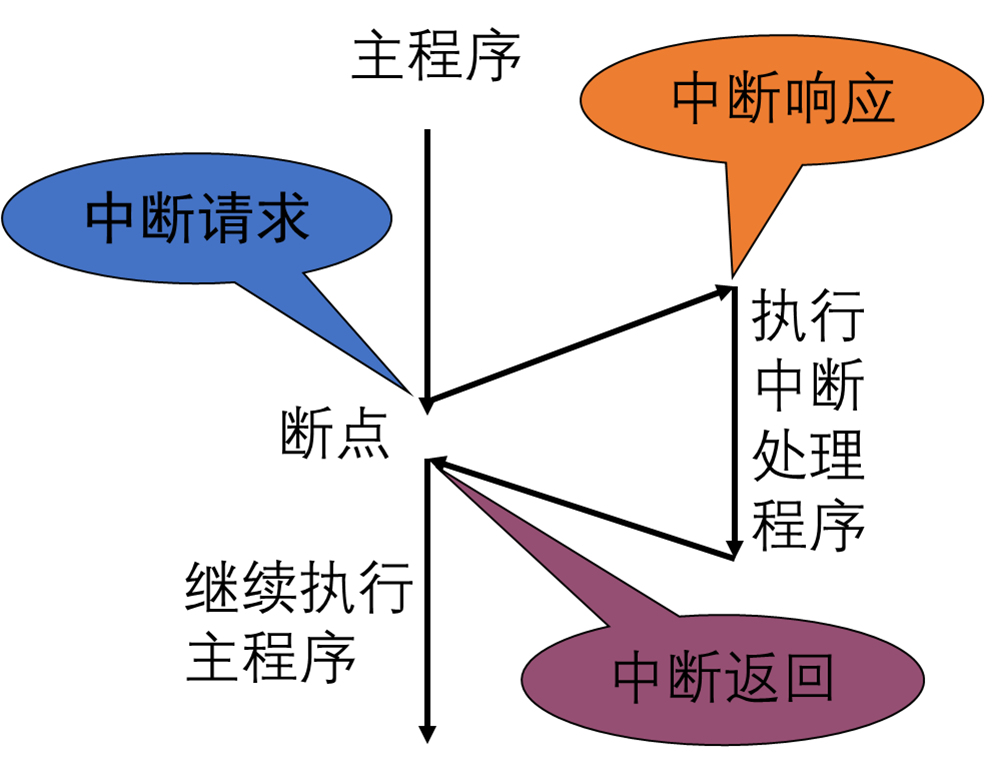
中断系统是为使 CPU 具有对外界紧急事件的实时处理能力而设置的, 当中央处理机 CPU 正在处理某件事的时候外界发生了紧急事件请求,要求 CPU 暂停当前的工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
CPU 执行程序过程中,在每个机器周期的S5P2期间,中断系统对各个中断源进行采样。
可能会有一些滞后
当前指令执行完之后 , 双周期
正在执行的指令为RET、RETI或任何访问IE或IP寄存器的指令。即只有在这些指令后面至少再执行一条指令时才能接受中断请求。
执行一条硬件LCALL指令
RETI中断函数返回,清除中断状态的标志位,否则如果来了一个小于等于当前中断优先级的中断事件不会响应
具体流程可以看这个视频,很清楚。
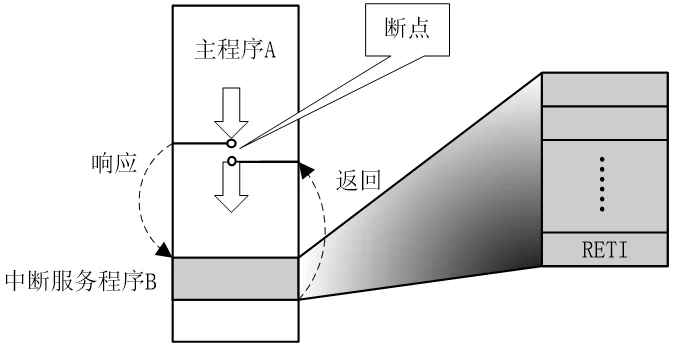
核心逻辑 通过程序代码和中断机制控制程序计数器 PC,让 PC 来回在不同代码段之间切换。 在 0000H-0030H 中有很多个中断地址,每个有 8 个字节,保存中断函数的位置地址
| 环节 | 作用 |
|---|---|
| ①中断源 | 申请中断的来源 |
| ②中断申请 | 中断源发出信号提出申请 |
| ③中断控制 | 中断系统判断是否要响应申请 |
| ④保护现场 | 安排好当前的工作)b=a,a=c, 保护当前 PC 指针的位置 |
| ⑤中断服务 | 响应中断源的申请 |
| ⑥恢复现场 | 完事后,回去…… |
| ⑦中断返回 | 继续做打断前的工作 |
中断响应与子程序调用的区别
- 函数的执行是由程序员事先安排好的(由一条调用函数指令来转入), 而中断服务程序是由随机的中断事件引起的 ;
- 函数的调用受到主调函数控制
而中断服务程序一般与被中断的程序毫无关系 ( 没有从属关系 );
- 有可能发生多个中断事件同时请求 CPU 服务的情况。
- 地址中断响应程序的入口地址固定,而函数或者子程序调用中的子函数可以放在程序空间的任意位置。
- 中断返回指令
RETI, 子程序返回指令RET
- 有两种保护方式:外部保护再进子程序 ; 进入子程序后再保护。中断事件保护现场只能放在中断服务当中,不能提前保护现场
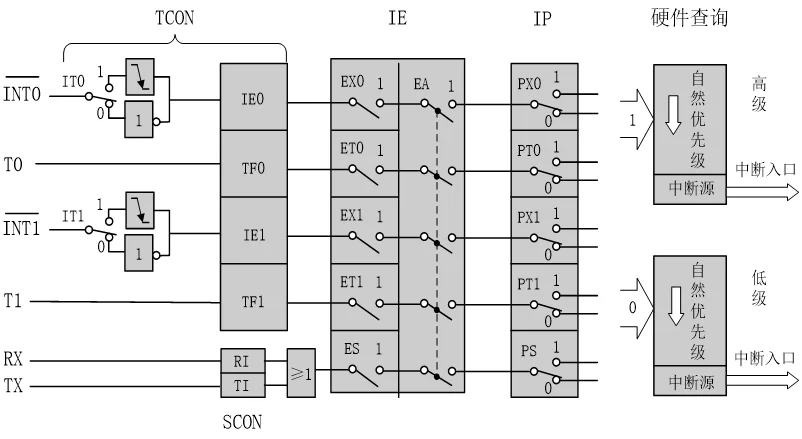
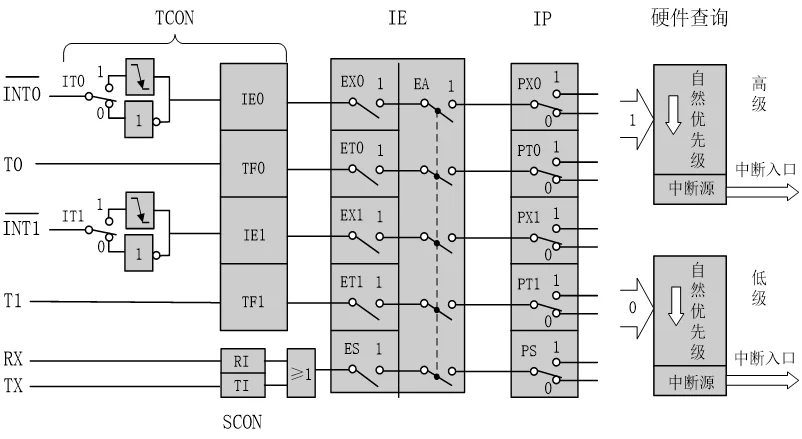
中断系统结构 ¶
中断源、中断标志位、中断开关、中断优先级、中断入口地址
EA 虚线代表几个开关是联动的
中断源 ¶
| 中断源 | TCON | 中断向量(入口地址) | 中断号 | 优先级 |
|---|---|---|---|---|
| \(\overline{INT0}\) 外部中断 | IE0 | 0003H-000AH |
0 | 高 |
| T0 定时计数器 0 | TF0 | 000BH-0012H |
1 | |
| \(\overline{INT1}\) 外部中断 1 | IE1 | 0013H-001AH |
2 | |
| T1 定时计数器 1 | TF1 | 001BH-0022H |
3 | |
| TX/RX 串行口 | RI 或 TI | 0023H-002AH |
4 | 低 |
5+1 = 6 个中断源:两个外部中断,两个定时中断,两个串行中断
- \(\overline{INT0}\)(P3.2
) 。可由IT0(TCON.0)选择其为低电平有效还是下降沿有效。当 CPU 检测到P3.2引脚上出现有效的中断信号时,中断标志IE0(TCON.1)置 1,向 CPU 申请中断。 - \(\overline{INT1}\)(P3.3
) 。可由IT1(TCON.2)选择其为低电平有效还是下降沿有效。当 CPU 检测到P3.3引脚上出现有效的中断信号时,中断标志IE1(TCON.3)置 1,向 CPU 申请中断。 - TF0(
TCON.5), 片内定时 / 计数器T0溢出中断请求标志。当定时 / 计数器T0发生溢出时,置位TF0, 并向 CPU 申请中断。 - TF1(
TCON.7), 片内定时 / 计数器T1溢出中断请求标志。当定时 / 计数器 T1 发生溢出时,置位TF1, 并向 CPU 申请中断。 - RI(
SCON.0)或TI(SCON.1), 串行发送 / 接受
串行口中断请求标志。当串行口接收完一帧串行数据时置位RI或当串行口发送完一帧串行数据时置位TI, 向 CPU 申请中断。
起始地址开始的 8 个地址
在第 2 章中已经讲过,地址为 0003H-002AH 的共 40 个单元是单片机 5 个中断源的中断服务程序存放地址区,它被分为 5 段,每段 8 个单元,分别分配给 5 个中断源,具体分配如下:
开关(都在 SFR)¶
TCON(定时 / 计数器控制寄存器)
触发:低电平 or 下降沿

IT0(TCON.0), 外部中断 0 触发方式控制位。
当 IT0=0 时,为电平触发方式。
当 IT0=1 时,为边沿触发方式(下降沿有效) 。
IE0(TCON.1), 外部中断 0 中断请求标志位。
IT1(TCON.2), 外部中断 1 触发方式控制位。
IE1(TCON.3), 外部中断 1 中断请求标志位。
TF0(TCON.5), 定时 / 计数器T0溢出中断请求标志位。
TF1(TCON.7), 定时 / 计数器T1溢出中断请求标志位。
SCON( 串行口控制寄存器 )

IP(2 个人为优先级)

IE(中断使能寄存器)
响应需要总开关打开且子开关打开
优先级 ¶
- CPU 总是先响应优先级别最高的中断请求。
- 不能被新的同级或低优先级的中断请求所中断
- 能被高优先级中断请求所中断
打印机发送打印任务,中断,CPU 处理其他任务
实例 ¶
- 中断源有中断请求
- 此中断源的中断允许位为 1
- CPU 开中断(即 EA=1)
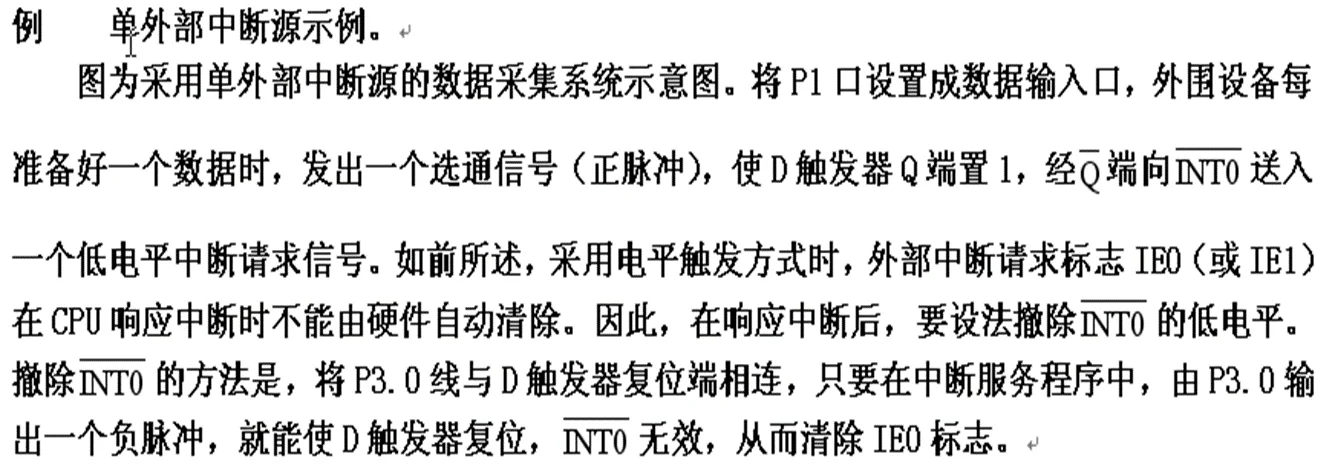
中断程序标准写法:
ORG 0000H
START:
LJMP MAIN ;跳转到主程序
ORG 0003H
LJMP INT0 ;转向中断服务程序
ORG 0030H ;主程序
MAIN:
CLR IT0 ;设为电平触发方式
SETB EA ;CPU开放中断
SETB EX0 ;允许中断
MOV DPTR,#1000H ;设置数据区地址指针
AJMP $
ORG 0200H ;中断服务程序
INT0:
PUSH PSW ;保护现场
PUSH ACC
CLR P3.0 ;由P3.0输出0
NOP;
NOP;
SETB P3.0 ;由P3.0输出1,撤除
MOV A,P1 ;输入数据
MOVX @DPTR,A ;存入数据存储器
INC DPTR ;修改数据指针,指向下一个单元
... ...
POP ACC ;恢复现场
POP PSW
RETI ;中断返回
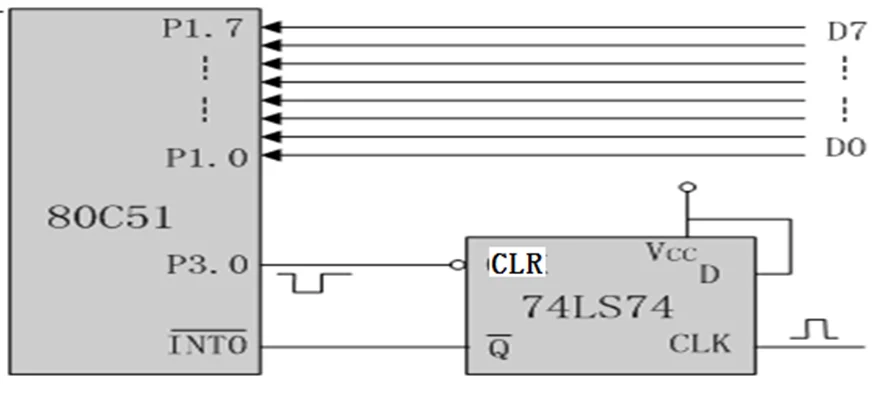
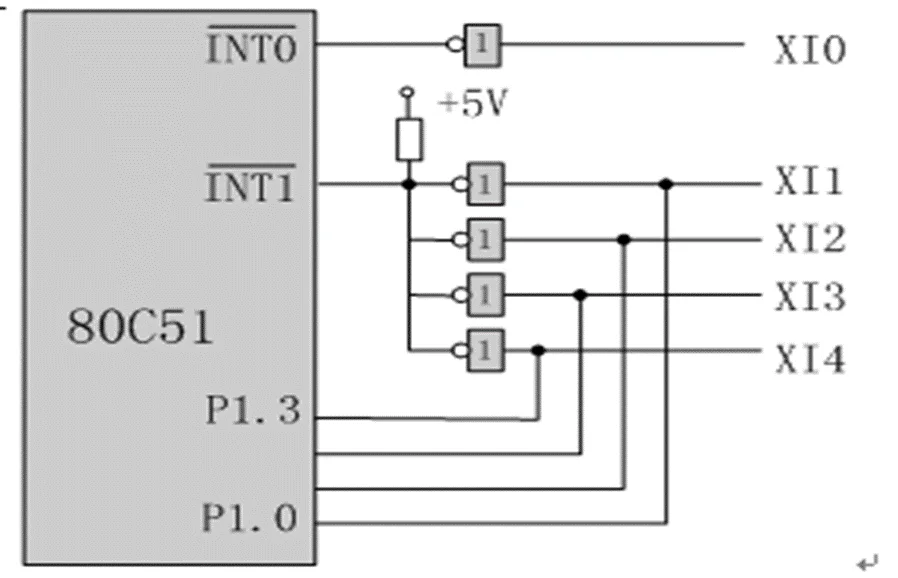
外部中断的扩展 ¶
多外部中断源的系统示例。
设有 5 个外部中断源,中断优先级排队顺序为:XI0、XI1、XI2、XI3、XI4。试设计它们与 80C51 单片机的接口。
ORG 0003H
LJMP INSE0 ;转外部中断0服务程序入口
ORG 0013H
LJMP INSE1 ;转外部中断1服务程序入口
… …
… …
INSE0:
PUSH PSW ;XI0中断服务程序
PUSH ACC
… …
… …
POP ACC
POP PSW
RETI
INSE1:
PUSH PSW ;中断服务程序
PUSH ACC
JB P1.0,DV1 ;P1.0为1,转XI1中断服务程序
JB P1.1,DV2 ;P1.1为1,转XI2中断服务程序
JB P1.2,DV3 ;P1.2为1,转XI3中断服务程序
JB P1.3,DV4 ;P1.3为1,转XI4中断服务程序
INRET:
POP ACC
POP PSW
RETI
DV1:
… … ;XI1中断服务程序
AJMP INRET
DV2:
… … ;XI2中断服务程序
AJMP INRET
DV3:
… … ;XI3中断服务程序
AJMP INRET
DV4:
… … ;XI4中断服务程序
AJMP INRET
定时 / 计数 ¶
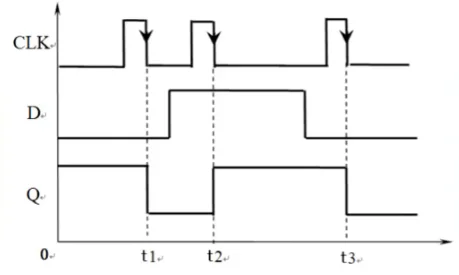
时序 ¶
时序是对象(事件、信息)按照时间顺序组成的序列关系
时序图最为常用。
纵轴表示电平
晶振fosc
机器周期、指令周期、振荡周期、状态周期
1 状态 = 2 振荡
1 机器 = 12 振荡
1 指令 = 1~4 个机器周期
1 个指令周期 =N 个机器周期 =6N 个状态周期 =12N 个节拍 =12N 个时钟周期 =12N 个振荡周期
- 如果晶振频率 \(f_{osc} = 12 MHz\), 则时钟周期 \(T_{clock}\) 为: \(T_{clock} = \frac{1}{12 \times 10^6 Hz} = 83.33 ns\)
- 如果某个微处理器的一个机器周期需要 12 个时钟周期完成,则机器周期 \(T_{machine}\) 为: \(T_{machine} = 12 \times 83.33 ns = 1\mu s\)
短时延时函数
;简单
DELAY:
MOV R7,#TIME
LOOP:
NOP
NOP
DJNZ R7,LOOP
RET
;定时较长
DELAY:
MOV R5,#TIME1
LOOP2:
MOV R7,#TIME2
LOOP1:
NOP
NOP
DJNZ R7,LOOP1
DJNZ R5,LOOP2
RET
定时器 / 计数器结构 ¶
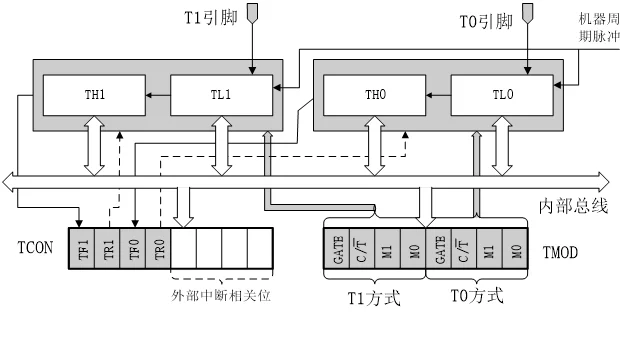
2 个 16 位定时器、计数器:
- T0 由两个 8 位 SFR TH0(high)TL0(low)构成
- T1 由两个 8 位 SFR TH1 TL1 构成
实质是 +1 计数器
定时器在单片机内部就像一个小闹钟一样,根据时钟的输出信号,每隔“一秒”, 计数单元的数值就增加一,当计数单元数值增加到“设定的闹钟提醒时间”时,计数单元就会向中断系统发出中断申请,产生“响铃提醒”, 使程序跳转到中断服务函数中执行 - 定时器:机械周期,晶振已知;对片内时钟进行计数;计数值 N 乘以机器周期\(T_{cy}\)就是定时时间\(t\) 。 - 计数器:例如光电码盘测量电机转速;对 Tx 引脚输入的脉冲进行计数
加1计数器输入的计数脉冲有两个来源,一个是由系统的时钟振荡器输出脉冲经12分频后送来;一个是T0或T1引脚输入的外部脉冲源。
寄存器 ¶
控制寄存器TCON¶
TR0 TR1 控制定时计数器的启动停止
TF0 TF1 溢出中断请求标志位
工作方式寄存器TMOD ¶
低四位 T0,高四位 T1

-
M0M1:工作方式设置位工作在 4 种模式
M1M0 工作方式 说明 00 方式 0 13 位定时计数器 01 方式 1 16 位定时计数器 10 方式 2 8 位自动重装定时计数器 11 方式 3 T0 两个独立 8 位计数器,T1 停止计数
- CT:定时控制器选择位:工作在定时模式(0)还是计数模式(1)
- GATE:启停模式
中断允许控制寄存器 IE ¶

开启 ET1,ET0 才能中断
工作方式 ¶
兼容 48 芯片,所以有 4 种工作状态
方式 0 ¶
方式 0 为 13 位计数,由 TL0 的低 5 位(高 3 位未用)和 TH0 的 8 位组成
定时模式 Gate = 0,CT = 0
Gate = 1:由 INT0 进行控制
Gate = 0:或门让右侧一直是 1 , 完全由 TR 决定
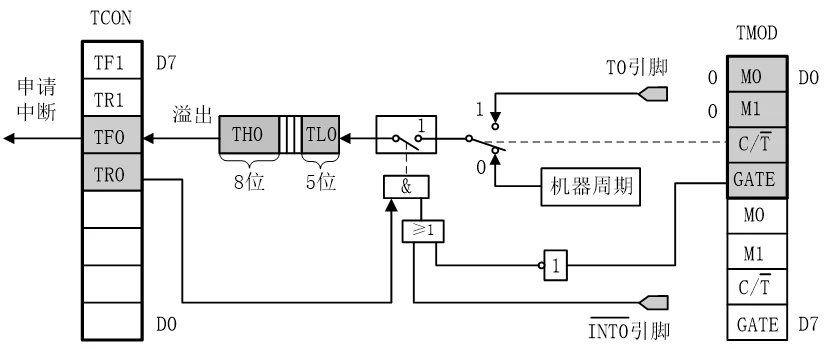
分析上图可以得出设置规律
- 计数外部脉冲个数: \(1~8192(2^{13})\)
- 定时时间: \(T~8192T\)
- \(f_{osc}=12MHz\),\(T=1\mu s\) 时,最大定时时间:\(8.19ms\)
控制不同初始值来控制定时时间:溢出后会中断
初始化定时 / 计数器时,初值 N 计算 :
- 定时机器周期数:\(N=\frac{t}{T}\) ——定时时间 / 机器周期
- 计数初值:$X=2^{13}-N $——计数最大值与计数值之差
测量周期 / 频率
设置 TR = 1,CT = 0,GATE = 1;
INT0 输入,高电平时候,计时开始 ; 就可以记录高电平有多少个机械周期
方式 0,查询方式
选用定时 / 计数器 1工作方式 0 产生 \(500\mu s\) 定时 , 在 P1.1 输出周期为 \(1ms\) 的方波 , 设晶振频率 =\(6MHz\)。
=== "TMOD 进行初始化 "
- GATE=0(用 TR1 位控制定时的启动和停止)<br>
- C/T =0(置定时功能)<br>
- M1M0=00(置方式 0)<br>
- 因定时/计数器 0 不用,可将其置为方式 0(不能置为工作方式 3)<br>
- 这样可将 TMOD 的低 4 位置 0,所以(TMOD)=00H。<br>
=== "计算定时初值"
$[2^{13}- X]\times 2=500 X=7942D=1111100000110B$
将低 5 位送 TL1,高 8 位送 TH1 得:$(TH1)=F8H$,$(TL1)=06H$
=== "代码实现"
```assembly
ORG 0000H
LJMP MAIN
ORG 0300H
MAIN:
MOV TMOD,#00H ;TMOD 初始化
MOV TH1,#0F8H ;设置计数初值
MOV TL1,#06H
MOV IE,#00H ;禁止中断
SETB TR1 ;启动定时
LOOP:
JBC TF1,ZCZ ;查询计数溢出
AJMP LOOP
ZCZ:
MOV TL1,#06H ;重新置计数初值
MOV TH1,#0F8H
CPL P1.1 ;输出取反
AJMP LOOP ;重复循环
```
方式 1 ¶
16 位计数 65536
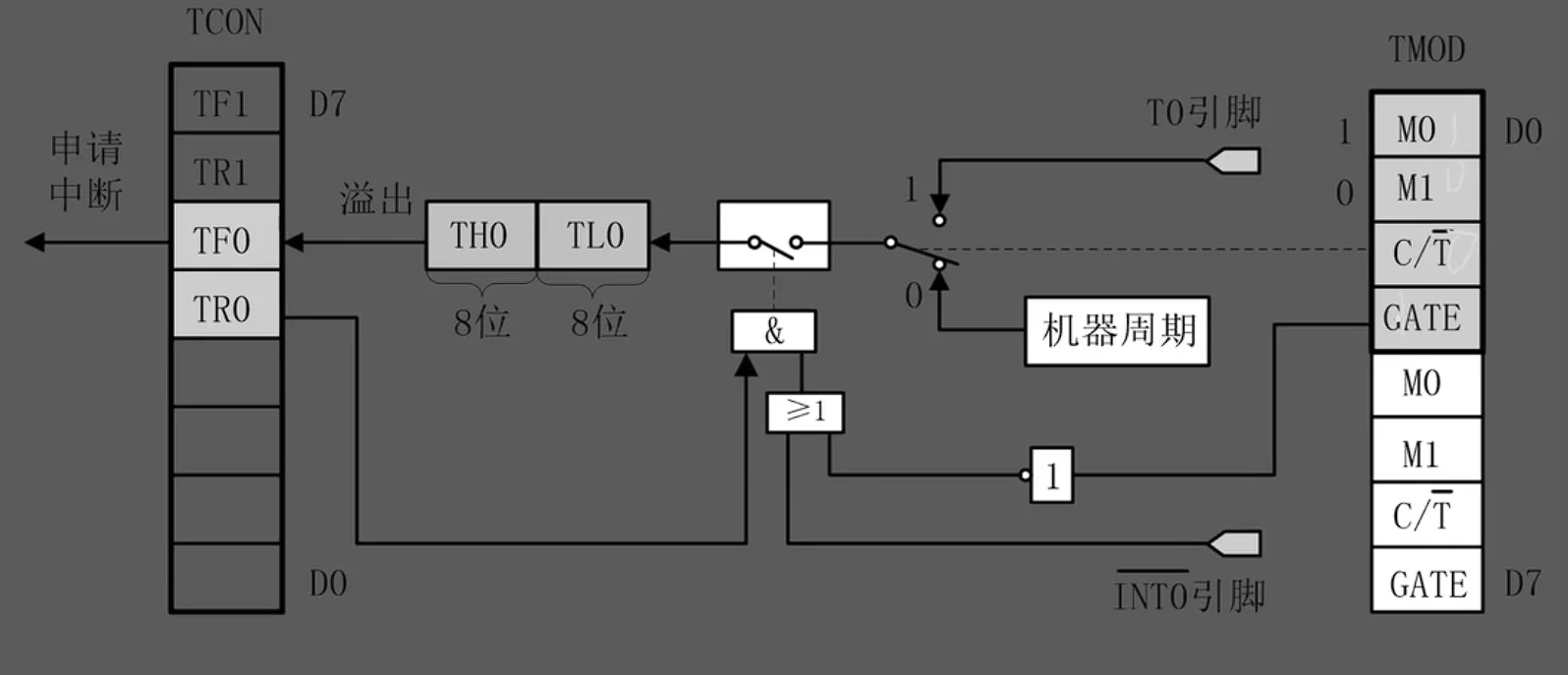
GATE 为 1 的时候,由 INT0 决定
可以用来测量脉宽
定时时间超过最大定时时间
例如 , 要求延时 100ms, 最大 65536 个机械周期
可以设置成50ms延时并执行两次
例子
例 1 利用定时 / 计数器 T0 的方式 1, 产生 10ms 的定时 , 并使 P1.0 引脚上输出周期为 20ms 的方波 , 采用中断方式 , 设系统时钟频率为 12 MHz。
由于晶振为 12 MHz, 所以机器周期 \(Tcy\) 为 \(1 ns\)
\(N=\frac{t}{T_{cy}}=\frac{10\times10^{-3}}{1\times10^{-6}}=10000\)
\(X=65536-10000=55536=D8F0H\)
即应将 \(D8H\) 送入 \(TH0\) 中 ,\(F0H\) 送入 \(TL0\) 中
M1M0=01,GATE=0,C/T=0, 可取方式控制字为 01H;
ORG 0000H
LJMP MAIN ;跳转到主程序
ORG 000BH ;T0的中断入口地址
LJMP DVT0 ;转向中断服务程序
ORG 0100H
MAIN:
MOV TMOD,#01H ;置T0工作于方式1
MOV TH0,#0D8H ;装入计数初值
MOV TL0,#0F0H
SETB ET0 ;T0开中断
SETB EA ;CPU开中断
SETB TR0 ;启动T0
SJMP $ ;等待中断,程序一直停在这里,直至中断。
DVT0:
CPL P1.0 ;P1.0取反输出
MOV TH0,#0D8H ;重新装入计数值
MOV TL0,#0F0H
RETI ;中断返回
END
方式 2 ¶
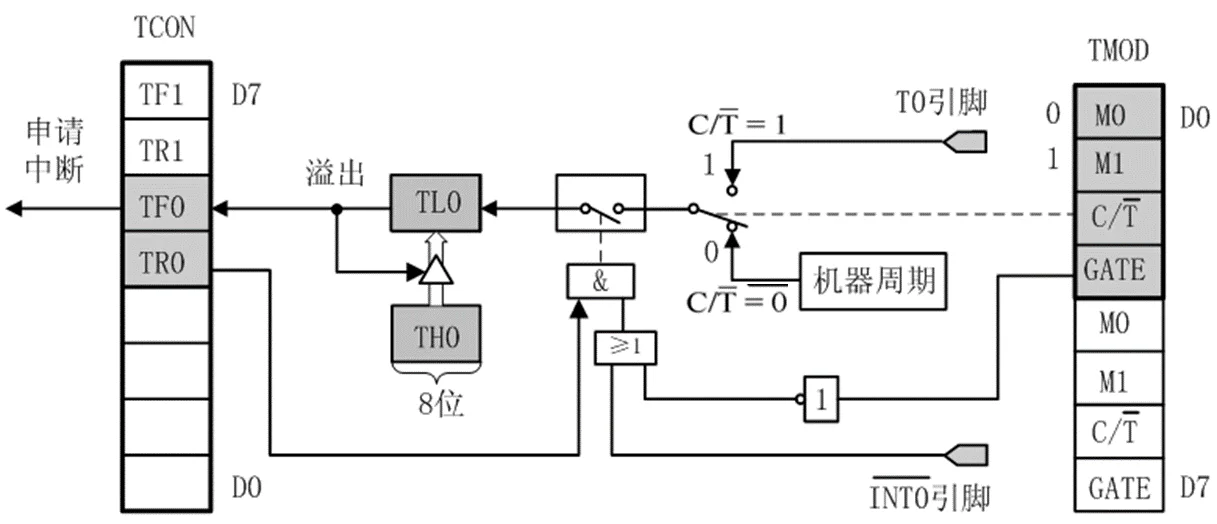
8 位自动重装定时计数器
- 方式 0,方式 1,溢出后变成 0000,需要重新设置初始值
- 方式 2,可以自动将 TH0 中的值压入 TL0,不需要人工赋值
一般 C/T = 0,GATE =0
计数外部脉冲个数范围:1~256(\(2^8\))
定时时间范围:T~256T
方式 2
例 1:用定时 / 计数器 1 以工作方式 2 计数 , 要求每计满 100 次进行累加器加 1 操作。
=== "TMOD 初始化 "
- M1M0=10(方式 2)
- CT=1(计数功能)
- GATE=0(TR1 启动和停止)
因此(TMOD)=60H。
=== "计算计数初值"
$2^8-100=156D=9CH$ 所以 $TH1=9CH$
```assembly
ORG 0000H
AJMP MAIN ;跳转到主程序
ORG 001BH ;定时/计数器 1 中断服务程序入口地址
INC A
RETI
ORG 0030H
MAIN:
MOV TMOD #60H ;TMOD 初始化
MOV TL1,#9CH ;首次计数初值
MOV TH1,#9CH ;装入循环计数初值
SETB EA ;开中断
SETB ET1
SETB TR1 ;启动定时/计数器 1
HERE: SJMP $ ;等待中断
```
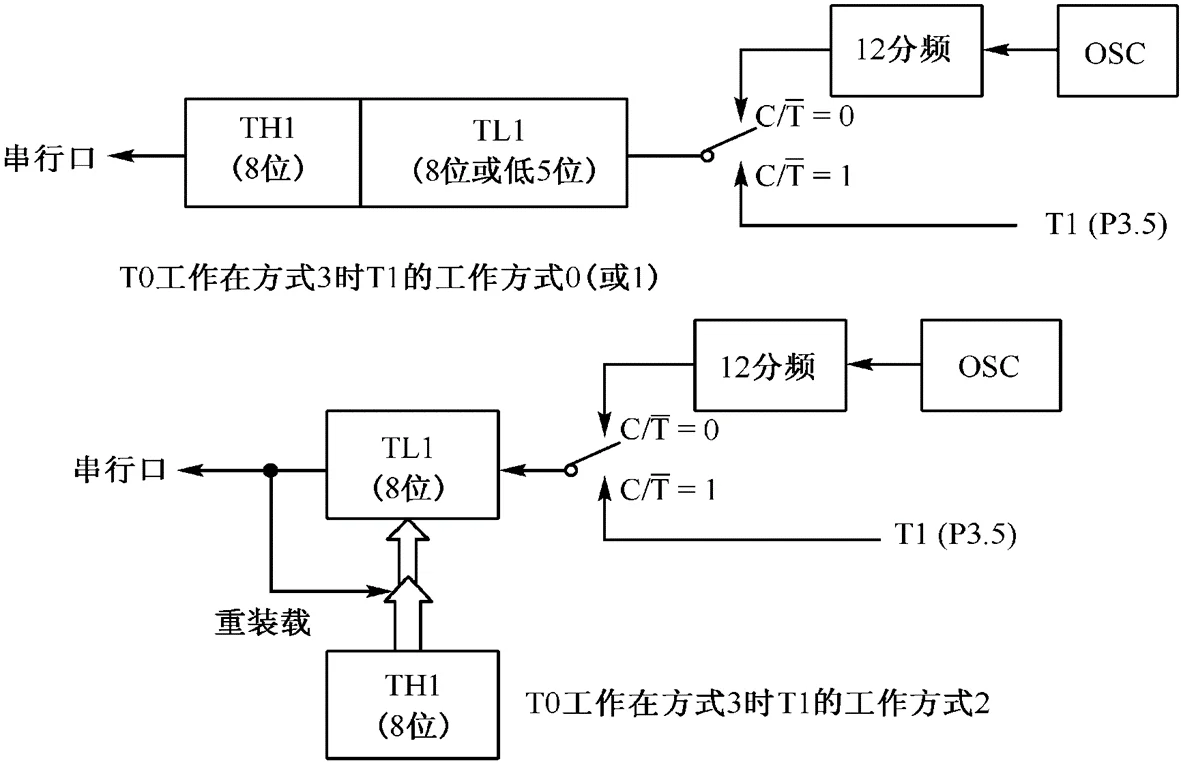
方式 3 ¶
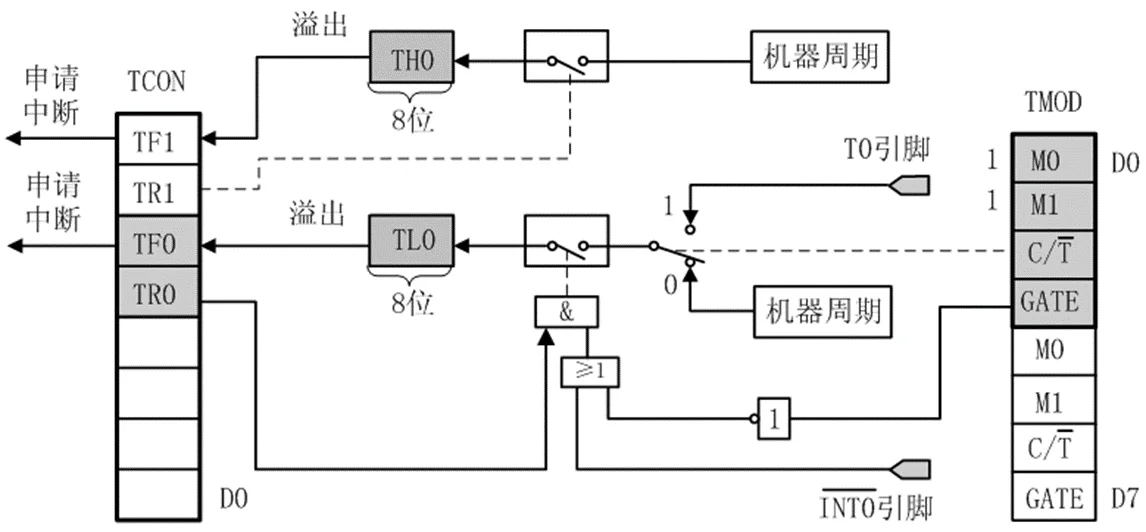
T0 分成两个 8 位定时 / 计数器 TL0 和 TH0 ;
TL0既可计数也可定时,是一个 8 位定时 / 计数器。占用了 T0; 所有控制位:C/T,TR0,GATE,TF0 和 INT0、T0 引脚 ;
TH0只能作为定时器,因为 T0 已被 TL0 占用,TH0 用 T1 的控制位:TR1、TF1;
如果定时 / 计数器 T0 工作在方式 3,T1 只能工作在 0、1、2 方式。此时由于 T1 的运行控制位 TR1 及计数溢出标志位 TF1 已被定时 / 计数器 T0 借用,这时,T1 作为串行口的波特率发生器使用。
欲用 80C51 产生两个方波,一个周期为 200μs,另一个周期为 400μs,该 80C51 同时使用串行口,用定时器/计数器作为波特率发生器。
用两个独立的定时计数器实现两个不同周期的定时
这时T0采用方式 3 工作 , 其中 , TL0产生 \(200\mu s\) 定时 , 由P1.0输出方波 ;
TH0产生 \(400\mu s\) 定时 , 由P1.1输出方波 ;
T1设置为方式 2 作波特率发生器用。\(f_{OCC}=9.216MHz\)
- TLO定时常数为TL0:\(t_{10} = 100μs\),\(TCL0 = 2^8 - 9.216×10^6×100×10^{-6} = 256 - 76.8 = 179.2\),单位 \(\mu s\),为十进制数值。十六进制数值为TL0 = B3H。
- TH0定时常数为TH0:定时时间为 \(t10 = 200μs\),\(TCH0 = 2^8 - 9.216×10^6×200×10^-6 = 256 - 153.6 = 102.4\),单位 \(\mu s\), 为十进制数值。十六进制的值为TH0 = 66 H。
- TH1 的波特率(详细计算见串行口部分2400 , 则定时常数为TC2 = F6H
; 定时器0初始化
MOV TL0, #0B3H ; 设TL0初值(100us定时)
MOV TH0, #66H ; 设TH0初值(200us定时)
MOV TL1, #0F6H ; 设TL1初值(波特率为2400)
MOV TH1, #0F6H ; 设TH1初值
SETB TR0 ; 启动TL0
SETB TR1 ; 启动TH0
SETB ET0 ; 允许TL0中断
SETB ET1 ; 允许TH0中断
SETB EA ; CPU中断开放
AJMP $
; 定时器0中断服务程序
ORG 0200H
ITL0: MOV TL0, #0B3H ; 重装定时常数
CPL P1.0 ; 输出方波(200us)
RETI
ITH0: MOV TH0, #66H ; 重装定时常数
CPL P1.1 ; 输出方波(400us)
RETI
; 主程序
ORG 0000H
AJMP MAIN
ORG 000BH ; TL0的中断入口
AJMP ITL0
ORG 001BH ; TH0的中断入口
AJMP ITH0
ORG 0100H
MAIN: MOV SP, #60H ; 设栈指针
MOV TMOD, #23H ; 设T0为方式3,T1为2
初始化 ¶
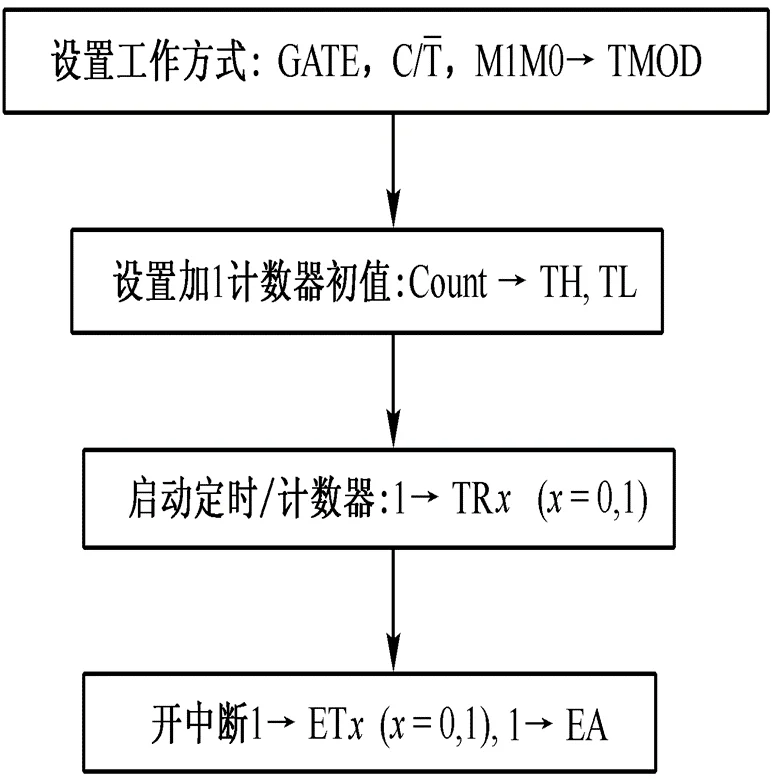
设置工作方式 TMOD
确定用 T0 还是 T1:初始化 TMOD 高四位还是低四位
定时模式还是计数模式:CT
方式 0-3 使用哪一种:M1M0
控制模式:GATE
计算初始值
计算加 1 计数器的计数初值 Count,并将计数初值 Count 送入 TH、TL 中
初始值 = 上限 - 计数值
计数方式时: \(X=M-计数值\)
定时方式时:定时值 \(t(\mu s)=(M—X)\cdot T_M=\frac{12}{f_{osc}(M-X)}\), 所以 \(X=M-t(\mu s)\times f_{osc}(MHz)_{12}\)。
- M 为定时计数器溢出值:\(2^N,N=13,16,8\)
- \(T_M\)单片机时钟周期
若采用中断方式,则应设置 IE
TCON
启动计数器工作 TCON,启动定时计数器使 TR0 或 TR1 置位
// 设置工作方式:GATE,C/T,M1M0→TMOD
TMOD = 0x01; // 定时器 0 工作在模式 1
// 设置加 1 计数器初值:Count→TH,TL
TH0 = 0xFC; // 高 8 位初值
TL0 = 0x66; // 低 8 位初值
// 启动定时/计数器:1→TRx (x=0,1)
TR0 = 1; // 启动定时器 0
// 开中断:1→ETx (x=0,1),1→EA
ET0 = 1; // 使能定时器 0 中断
EA = 1; // 总中断使能
串口通信 ¶
数据通信 = 数据处理 + 数据传输
MCS-51 单片机的串行口——全双工的异步串行通信接口(即:通用异步收发器 UART)
它内部包括一个发送器和一个接收器,实现 CPU 并行输出→串行发送,串行接收→CPU 并行接收的转换功能。
概念 ¶
有部分内容其实是计网物理层的内容

物理接口 ¶
串口、UART 口、COM 口、USB 口是指的物理接口形式 ( 硬件 )
概念
通用异步收发器(Universal Asynchronous Receiver/Transmitter),UART 是串口收发的逻辑电路,这部分可以独立成芯片,也可以作为模块嵌入到其他芯片里,单片机、SOC、PC 里都会有 UART 模块。
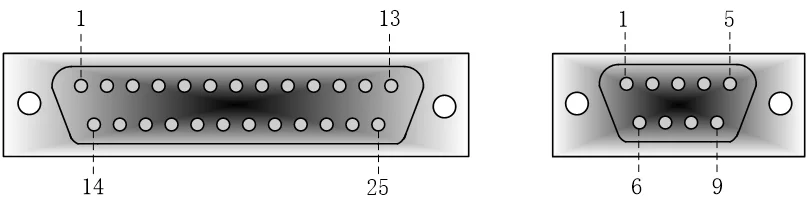
特指台式计算机或一些电子设备上的 D-SUB 外形 ( 一种连接器结构,VGA 接口的连接器也是 D-SUB) 的串行通信口,应用了串口通信时序和 RS232 的逻辑电平。
通用串行总线,和串口完全是两个概念。虽然也是串行方式通信,但由于 USB 的通信时序和信号电平都和串口完全不同,因此和串口没有任何关系。USB 是高速的通信接口,用于 PC 连接各种外设,U 盘、键鼠、移动硬盘、当然也包括“USB 转串口”的模块

电平标准(电信号)¶
TTL、RS-232、RS-485 是指的电平标准 ( 电信号 )
全双工(逻辑 1: 2.4V–5V 逻辑 0: 0V–0.5V)
距离:1m 左右
电平:全双工(逻辑 1:-15V–3V 逻辑 0:+3V–+15V)
距离:15m 左右,用 232 做中转可以做的更远;
负逻辑

| 主要引脚 | 作用 |
|---|---|
TXD P3.0 |
发送数据 |
RXD P3.1 |
接收数据 |
| SGND | 信号接地 |
公头 - 针 , 母头 - 孔(2,3 交换 ,5 共地)
不能过远的原因 : 距离太远,电平衰减
RS485 是一种串口接口标准,为了长距离传输采用差分方式传输,传输的是差分信号,抗干扰能力比 RS232 强很多。
半双工
可以实现主从机器的功能
注意
COM 口一般是 RS232,只是把 UART 的高电平电压增大了,以便传得更远,而 RS485 又在此基础上把低电平改成了负电压,从而把信号改成了差分信号,增加了抗干扰能力。其实信号的本质并没有变化。
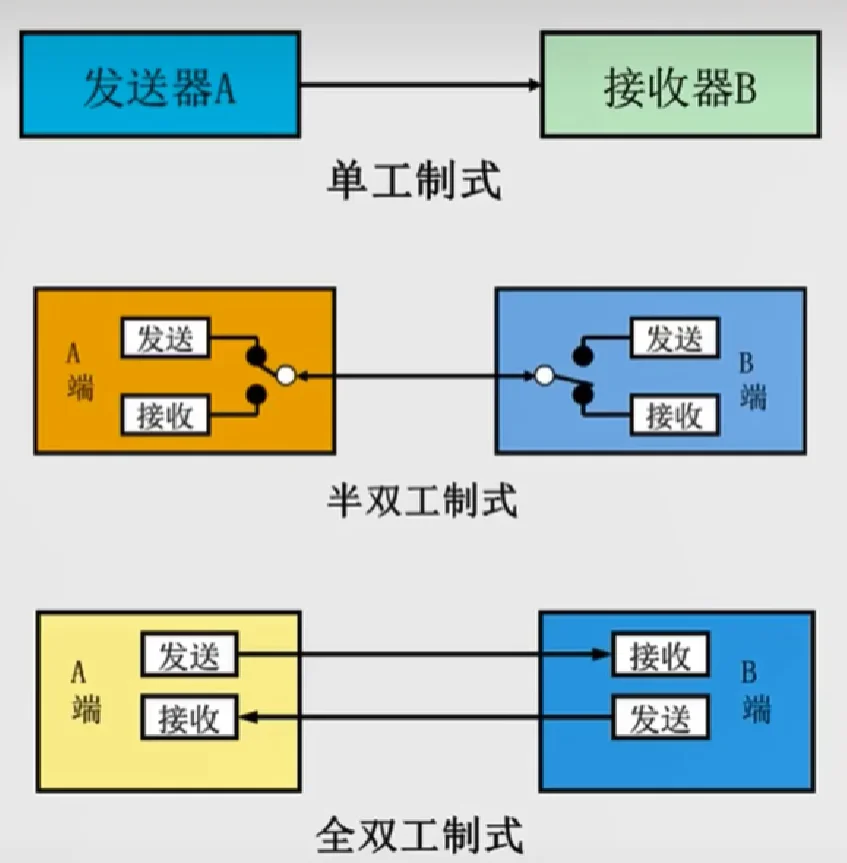
通信方向 ¶
全双工: 通信双方可以在同一时刻互相传输数据
半双工: 通信双方可以互相传输数据,但必须分时复用一根数据线;
在发送时候不可以接收,在接收的时候不可以发送
对讲机
单工: 通信只能有一方发送到另一方,不能反向传输
同步异步 ¶
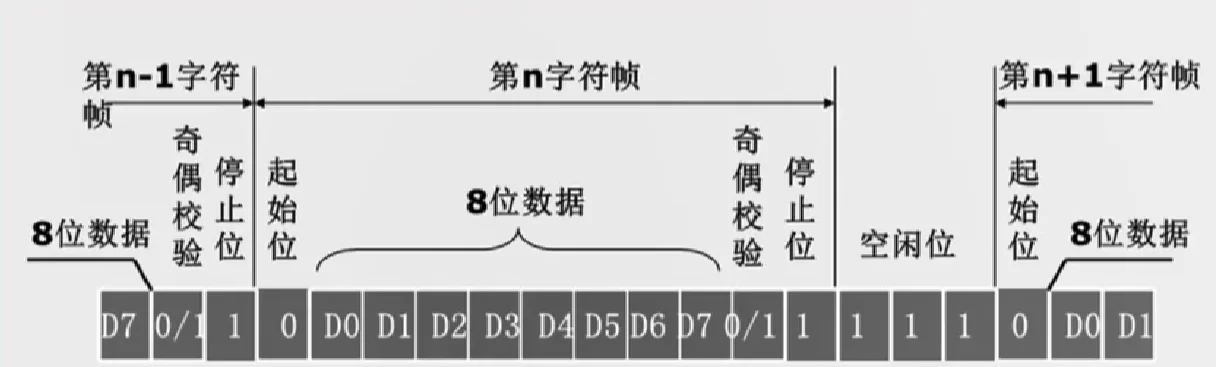
异步:
通信双方各自约定通信速率,
传输数据是以字符为单位的,待传送的字符串中的每个字符均加上起始位、停止位、校验位等控制信息位,构成一个字符帧。空闲的时候发送的是高电平 5V;起始位有低电平
帧与帧之间的时间间隔是任意的
同步:
通信双方靠一根时钟线来约定通信速率

通信速率 ¶
通信速率是以每秒传送多少个二进制位来度量的,这个速率称作波特率(Baud Rate), 其单位为 bps(bits per second,位 / 秒)
常用波特率:300,600,1200,2400,4800,9600,19200
总线:连接各个设备的数据传输线路(类似于一条马路,把路边各住户连接起来,使住户可以相互交流)
先确定波特率,让定时器产生波特率,约定波特率再通信
串口通信结构 ¶
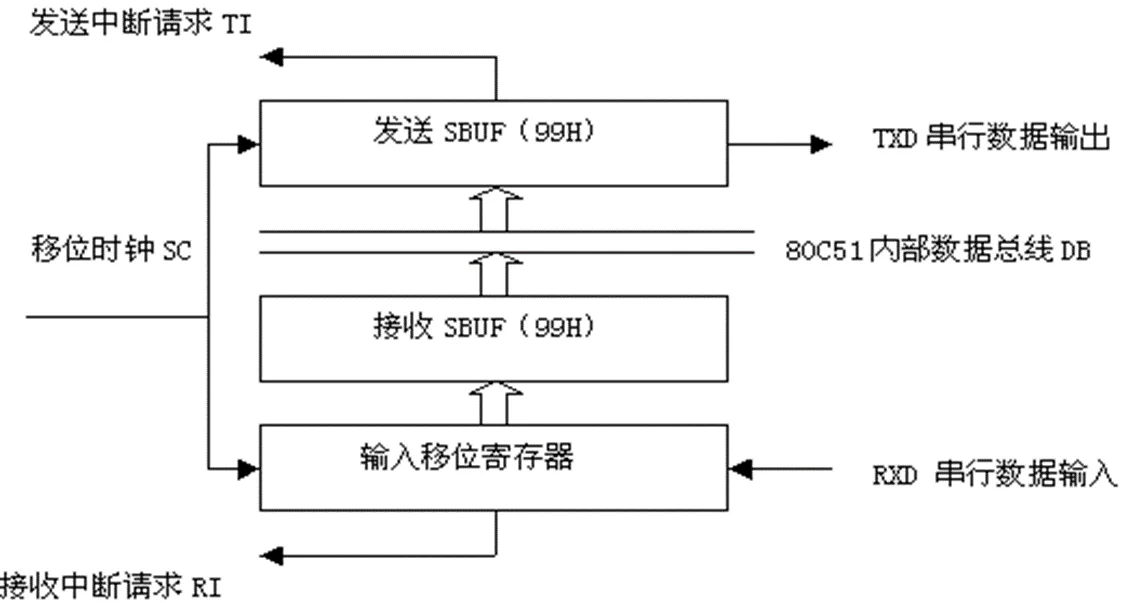
串行数据缓冲寄存器 SBUF(99H)¶
(逻辑地址只有一个,两个物理地址)
类似于一个教室有两个门
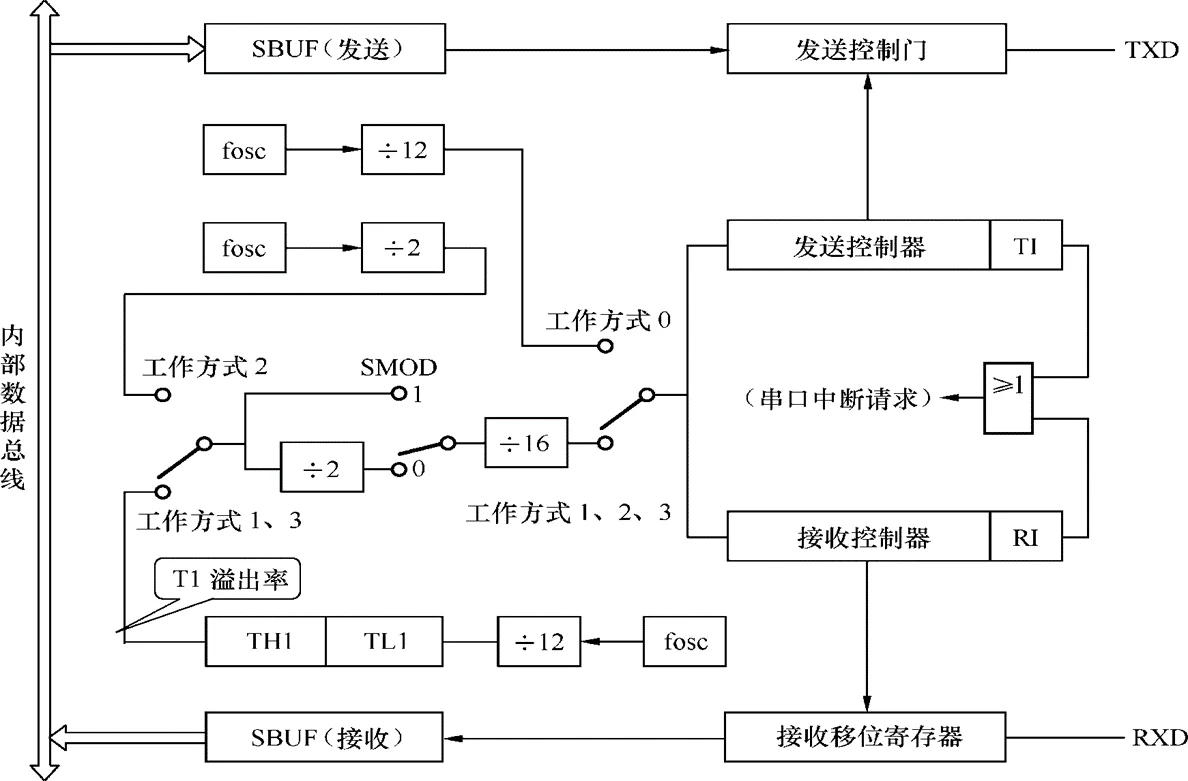
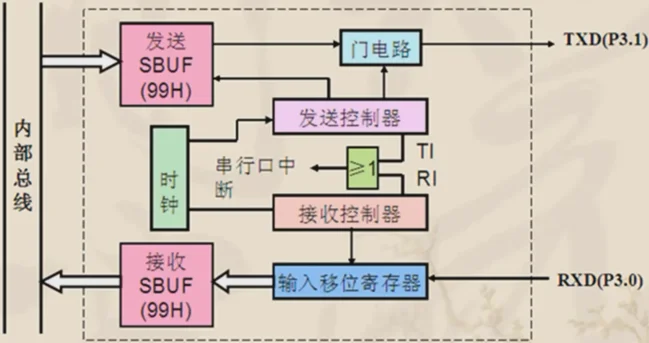
虽然接收和发送 SBUF 使用同一个逻辑地址,但物理是两个地址
接收移位寄存器,每收到一个位,就左移一个位,满载(8bit)以后就移到 SBUF 当中
接收最多 2Byte,主动发送最多 1Byte
接收方有两级缓存
串行口控制寄存器 SCON ¶

- SM0、SM1——串行口工作方式选择位。
- SM2——多机通信控制位 ( 主要用于方式 2 和方式 3)
- REN-允许 / 禁止串行口接收控制位:REN=1,允许接收 ;REN=0,禁止接收。可通过软件对该位进行设置
- TB8-第 9 位发送数据:方式 0 中不使用 TB8。在方式 1 中,TB8 为停止位,在方式 2 和方式 3 时,TB8 的内容是要发送的数据格式中的第 9 位。
- RB8-第 9 位接收数据:方式 0 中不使用 RB8;方式 1 中 RB8 为接收到的停止位;方式 2 和方式 3 时,RB8 存放接收到的第 9 位数据,在双机通信中,作为奇偶校验 ; 在多机通信中,用作区别地址帧 / 数据帧的标志。
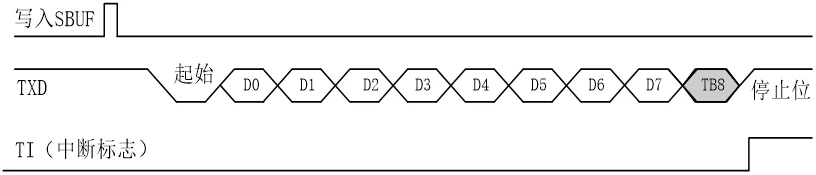
- TI ——发送结束和发送中断标志位:串行发送停止位的开始时候,内部硬件置 1;注意要清零
- RI——接收结束和接收中断标志位
可以通过检验 TI RI 来判断是否接受、发送结束
电源控制寄存器 PCON ¶
PCON 的单元地址为 87H,其内部各位均不能进行位寻址

SMOD 为串行口波特率倍增位,当串行口工作在方式 1 和方式 3 时,其波特率可调。调节手段之一便是利用 SMOD。
(1)若 SMOD=0,波特率不倍增 ;
(2)若 SMOD=1,则选定的波特率倍频 1 倍 ;
系统复位时,SMOD 自动清零
串口工作方式 ¶
帧的结构和通信速率不同
| SM0 | SM1 | 工作方式 | 功能描述 | 波特率 |
|---|---|---|---|---|
| 0 | 0 | 方式 0 | 8 位同步移位寄存器 | $frac{fosc}{12} $ |
| 0 | 1 | 方式 1 | 10 位异步收发 | 由定时器控制 |
| 1 | 0 | 方式 2 | 11 位异步收发 | \(\frac{fosc}{64}\) 或 $frac{fosc}{32} $ |
| 1 | 1 | 方式 3 | 11 位异步收发 | 由定时器控制 |
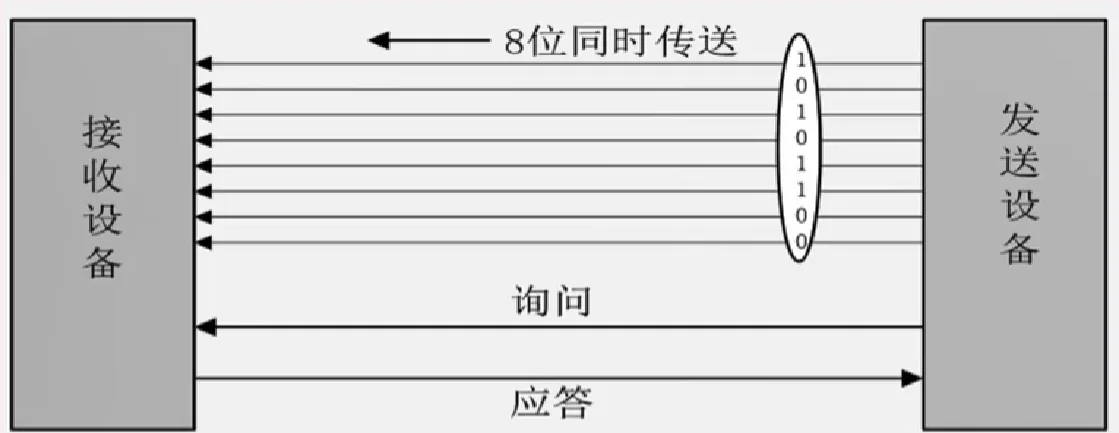
工作方式 0 ¶
发送 / 接收过程:SBUF 中的串行数据由 RXD 逐位移出 / 移入
(低位在先,高位在后);TXD 输出移位时钟,频率 = $frac{fosc}{12} $ ;
每送出 / 接收 8 位数据 TI/ RI 自动置 1; 需要用软件清零 TI/ RI。
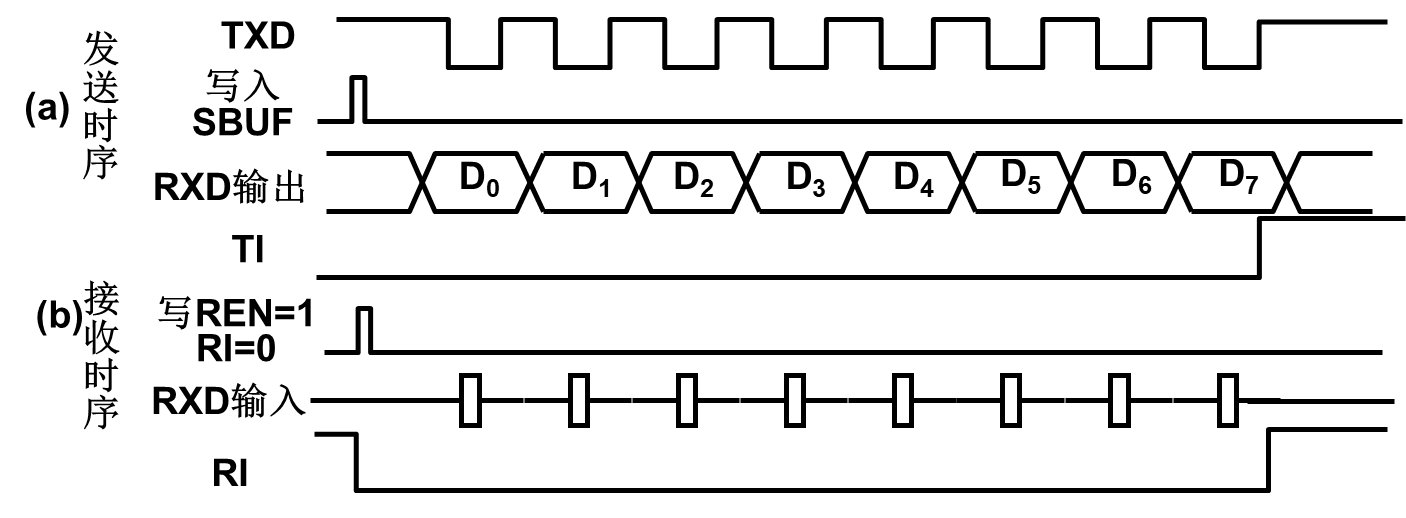
发送完成后,TI 就置 1
串行口在方式 0 下的工作并非是一种同步通信方式,经常配合“串入并出”“并入串出”移位寄存器一起使用,以达到扩展一个并行口的目的。扩展电路如下图所示。
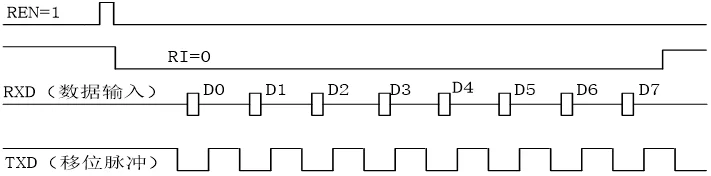
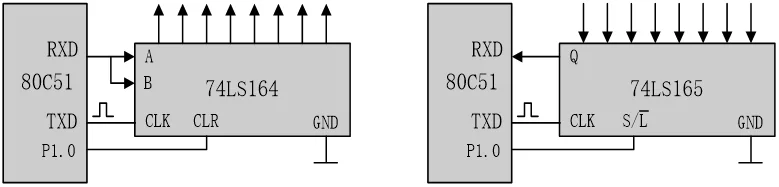
51 的 RXD 传入有效信息位,TXD 机械周期放到时钟,对外展示并行输出
如要发送数据,查询方式的程序如下:
MOV SCON,#00H ;串行口方式0
MOV SBUF,A ;将数据送出
JNB TI,$ ;等待数据发送完毕,等待TI=1,即发送完成
CLR TI ;为下次发送作准备,手动软件清零不要忘记
注意:复位时,SCON 已经被清零。
- 发送条件:TI=0。
- 接收条件:TI=0,置位 REN=1(允许接收数据
) 。
工作方式 1 ¶
10 位的异步通信:1 位起始位 +8 位信息位 +1 位结束位
波特率可变,由定时器 1 的波特率决定
| 起始位 | D0 | D1 | D2 | D3 | D4 | D5 | D6 | D7 | 停止位 |
|---|---|---|---|---|---|---|---|---|---|
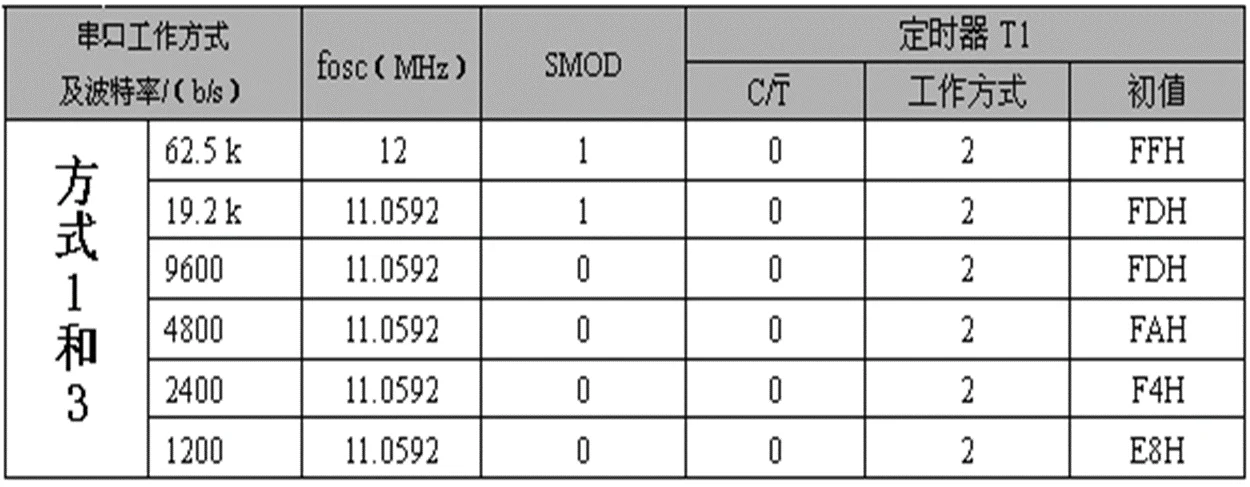
波特率设置
- 波特率 = \((2^{SMOD}/32) \times (定时/计数器 1 的溢出率)\)
- 定时 / 计数器 1 的溢出率 =$ frac{f_{osc}}{12 times (256 - 初值 )}\(;溢出率指的是 T1 溢出的频率,计算出 T1 溢出一次的时间\)T\(,那么\)frac{1}{T}$ 就是 T1 的溢出率
- 波特率 = \(2^{SMOD}/32 \times \frac{f_{osc}}{12 \times (256 - 初值)}\)
- 定时器初值 = \(256 - \frac{f_{osc} \times 2^{SMOD}}{384 \times 波特率}\)
为了能够被 384 整除
串行口工作时,\(f_{osc}\) 常取 11.0592M 而非 12M,是因为 11.0592M 时能提供更精确的波特率。12M 晶振计算出的定时器 T1 初值不是整数,会产生累计误差
;发送代码
MOV SCON,#40H ;串口工作在方式1下
MOV A,P1
MOV SBUF,A ;启动串口发送
LP:
JNB TI LP ;等待发送完成
CLR TI ;发送完成后清TI

;接收代码
MOV SCON, #50H; 串口工作在方式1,启动接收
LP:
JNB RI LP ; 等待接受完毕
MOV A, SBUF ;把收到的数据保存下来
MOV P1, A ;接收到的数据送P1口
CLR RI ; 清接收中断标志
工作方式 2 ¶
1 位起始位 +8 位数据 +1 位校验 +1 位终止
| 起始位 | D0 | D1 | D2 | D3 | D4 | D5 | D6 | D7 | 校验 | 停止位 |
|---|---|---|---|---|---|---|---|---|---|---|
发送过程
A、首先根据要传送的 8 位数据的特征 ( 如奇偶、地址 / 数据特征 ) 决定第 9 个信息位的状态。
B、启动串口发送(MOV SBUF,A 或 MOV SBUF,#XXH
C、待发送完毕后自动将 SCON 中的 TI 位置 1,表示发送过程结束。
接收过程
A、软件将REN置 1,启动串行口在方式 2 下的接收过程 ;
B、UART 自动地按规定的波特率从引脚RXD上逐位接收信息,移入串口中的接收移位寄存器。
C、接收完毕后,将接收移位寄存器中的数据位 D0~D7 锁入SBUF。同时将校验位送入SCON中的RB8位,自动将SCON中的 RI 置 1,表示接收过程结束。编程时可通过查询和中断方式对下一步进行处理。

波特率设置
倍频:SMOD = 1 波特率 = \(\frac{2^{SMOD}\times f_{osc}}{64} = \frac{f_{osc}}{32}\)
不倍频:SMOD = 0 波特率 = \(\frac{2^{SMOD}\times f_{osc}}{64} = \frac{f_{osc}}{64}\)
工作方式 3 ¶
多级通信 or 奇偶校验
在方式 3 下,串行口的结构、传送的帧格式、各位的定义皆与方式 2 相同,唯一的区别在于工作方式 3 通信的波特率是可编程的。
串口初始化 ¶
RITI 不会自动清零 必须软件清零
先确定波特率,再找到溢出率,再计算定时器初值,让串口得到这个溢出率
方式 0 的波特率 =$ frac{fosc}{12}$
方式 2 的波特率 =\((\frac{2^{SMOD}}{64})\cdot fosc\)
方式 1 的波特率 =\((2^{\frac{SMOD}{32}}) \times (T1 的溢出率)\)
方式 3 的波特率 =\((2^{\frac{SMOD}{32}}) \times (T1 的溢出率)\)

编程 ¶
查询方式 ¶
指令查询标志位 TI 和 RI:
TI =1,一帧发送完,TI≠1,没有发送完
RI=1,一帧数据已送到,RI≠1,没有送到
中断方式¶
设置中断允许,以TI和RI作为中断请求标志位,TI=1或RI=1均可引发中断。
串口方式 1
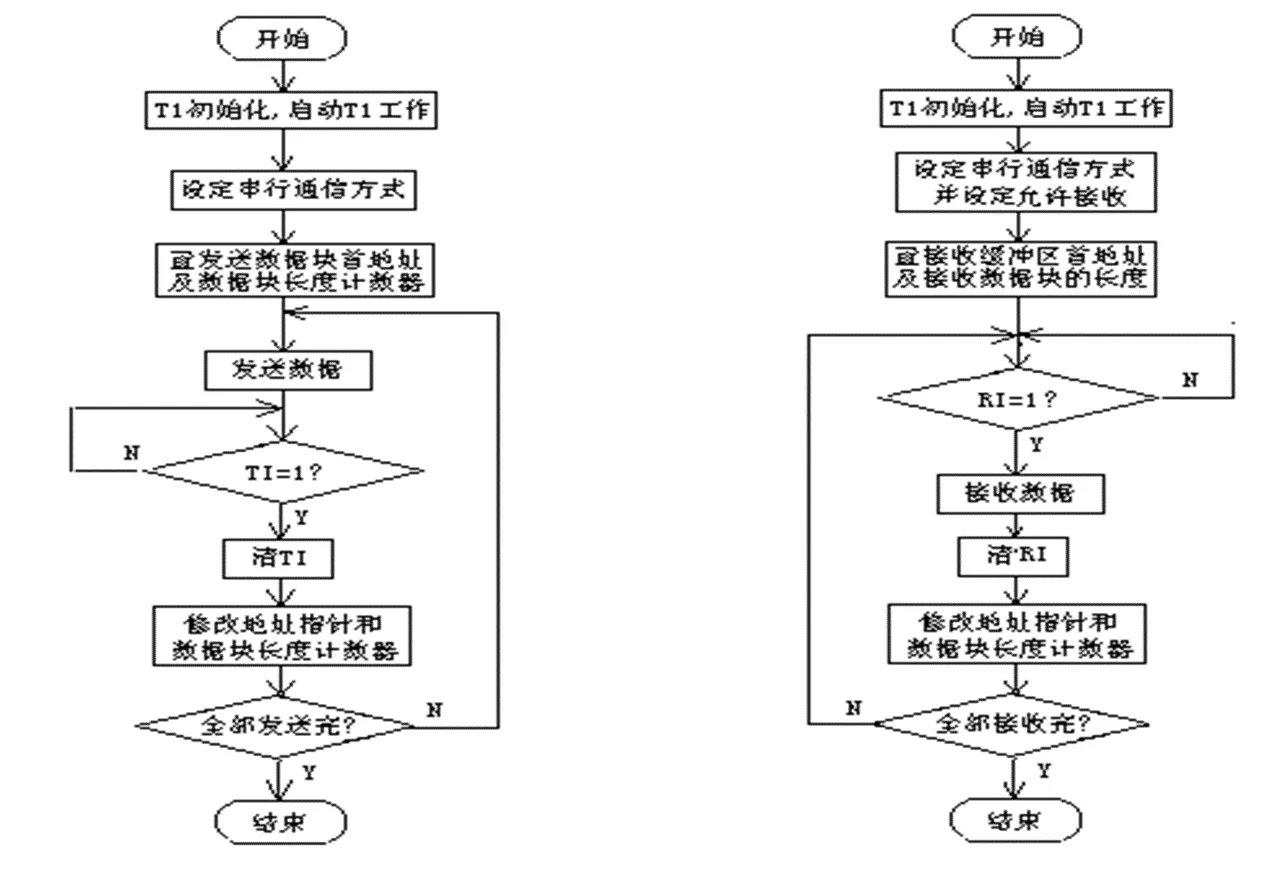
通过 MCS-51 串行口按模式 1 发送存放在片内RAM 20H~3FH中的数据,要求传送的波特率为1200bps。编写有关的通信程序。 fosc=11.0592MHz。
=== "计算"
设串行口为方式1,定时器/计数器T1为方式2作为串行口的波特率发生器。可以避免计数溢出后用软件重装定时初值的工作。
$波特率 = \frac{2^{SMOD}}{32}\times \frac{fosc}{12\times(2^8-TH1)}$
取$SMOD=0$
$(TH1)=232=0E8H$
=== "程序代码"
```assembly
;A机发送程序
MOV TMOD,#20H ;设T1为方式2
MOV TL1,#0E8H ;T1定时常数
MOV TH1,#0E8H
SETB TR1 ;启动T1
MOV SCON,#01000000B;设串行口为方式1
MOV R0,#20H ;设发送数据区首址
MOV R7,#32 ;发送32个ASCII码数据
LOOP:
MOV A,@R0 ;取ASCII码数据
MOV SBUF,A ;带校验位发送
JNB TI,$ ;发送等待
CLR TI ;清TI标志
INC R0 ;未发送完,则继续
DJNZ R7,LOOP
```
=== "B机接收"
采用查询方式,本例与上例相呼应,接收器把接收到的32个数据存放在20H-3FH单元内,波特率同上。
```
MOV SCON,#01010000B ;设串口方式1,允许接收
MOV TMOD,#20H;设置定时器T1为方式2
MOV TL1,#0E8H ;初值,波特率为1200b/s
MOV TH1,#0E8H
SETB TR1 ;启动T1运行
MOV R0,#20H ;数据存放首地址
MOV R7,#32 ;数据块长度
LOOP: JNB RI,$ ;RI由硬件置位
CLR RI ;软件清除RI
MOV A,SBUF
MOV @R0,A ;存放接收的数据
INC R0
DJNZ R7,LOOP
```